

Automatic hovering method of unmanned aerial vehicle (UAV)
A drone and hovering technology, applied in the direction of non-electric variable control, instrument, attitude control, etc., can solve the problems of high price, poor endurance of drones, complicated operation, etc., and achieve the effect of use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0055] like figure 1 Shown, a kind of unmanned aerial vehicle automatic hovering method comprises unmanned aerial vehicle main body and optical flow positioning device, and described optical flow positioning device is arranged on unmanned aerial vehicle main body,
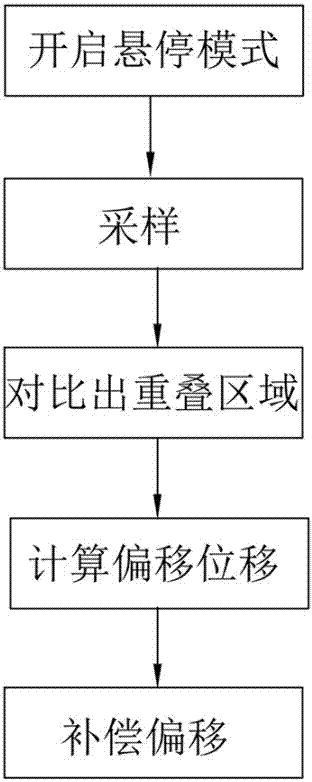
[0056] The automatic hovering method of the unmanned aerial vehicle may further comprise the steps:
[0057] S1: Turn on the hovering mode and record the initial hovering image;
[0058] S2: start sampling;
[0059] S3: Comparing the image sampled in the step S2 with the initial image to obtain the overlapping area of the two;
[0060] S4: Calculate the displacement that needs to be offset according to the overlapping area in the step S3;
[0061] S5: According to the calculation result in the step S4, control the UAV to compensate the offset.
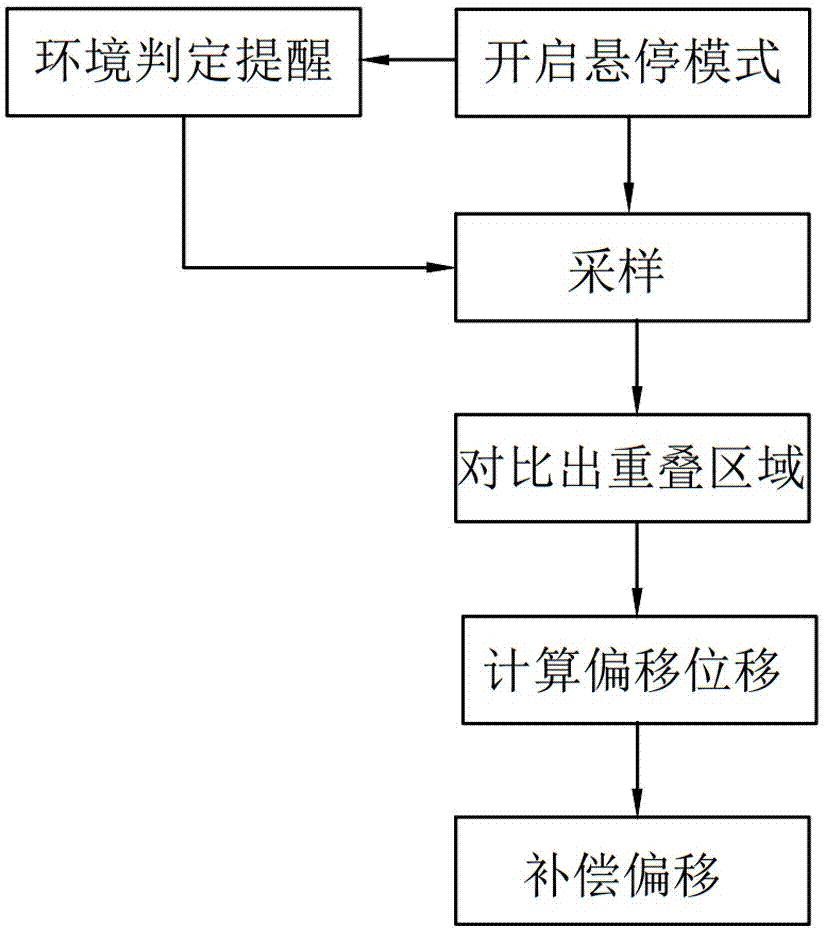
[0062] Further, such as figure 2 As shown, the automatic hovering method further includes a reminding step, and the reminding step includes reminding the user that ...
Embodiment 2
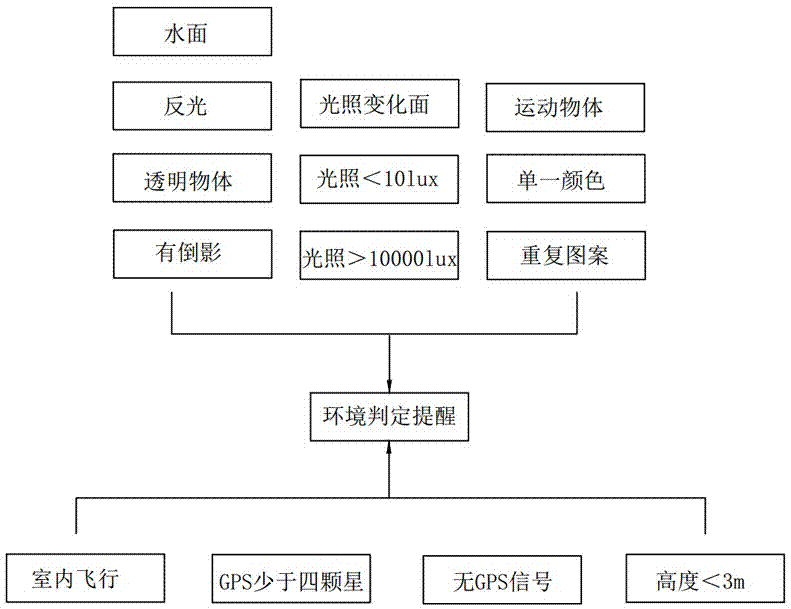
[0071] This embodiment is the specific implementation details of embodiment 1, such as Figure 6 As shown, when the drone needs to hover, the optical flow hovering system of the drone is turned on. On the one hand, the user can directly use the hovering according to his own judgment, or confirm whether to hover according to the internal judgment of the drone. . When the UAV reminder step is required, the optical flow camera judges the environment, when the ground is water, reflective, transparent, reflective, sharply changing, light10000lux, moving objects, In one or more cases of a single color or repeated patterns, the optical flow camera transmits signals to the main control board of the drone through the optical flow control board, and the main control board then transmits signals to the user end, generally the mobile end , to notify the user that the condition is not suitable for hovering, otherwise accidents may easily occur.
[0072] On the other hand, the optical flo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More