

Visual-servo-based screw hole locating and screw locking-removing method
A technology for screw hole positioning and visual servoing, which is applied in image data processing, image data processing, instruments, etc., can solve the problems of low positioning accuracy, difficulty in ensuring positioning accuracy, and few positioning times, so as to improve positioning accuracy and increase the number of positioning. The effect of a large working range, improved precision and efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0029] In order to make the purpose, technical solution and advantages of the present invention clearer, the embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
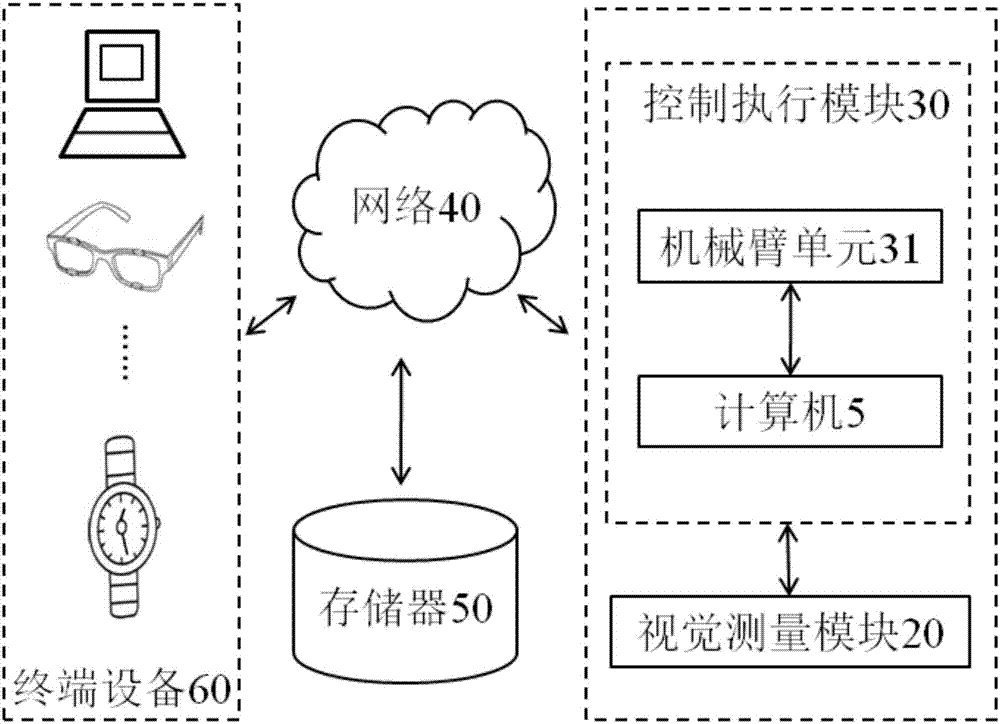
[0030] The present invention provides a method for positioning screw holes and locking and unloading screws based on visual servoing. What is used is a screw hole positioning and screw locking and unloading device based on visual servoing for positioning screw holes and locking and unloading screws, such as figure 1 As shown, the screw hole positioning and screw locking and unloading device based on visual servoing includes a visual measurement module 20 and a control execution module 30. The control execution module 30 includes a robotic arm unit 31 and a computer 5. The visual measurement module 20 and The control execution modules 30 perform data transmission and communication through the network 40 .
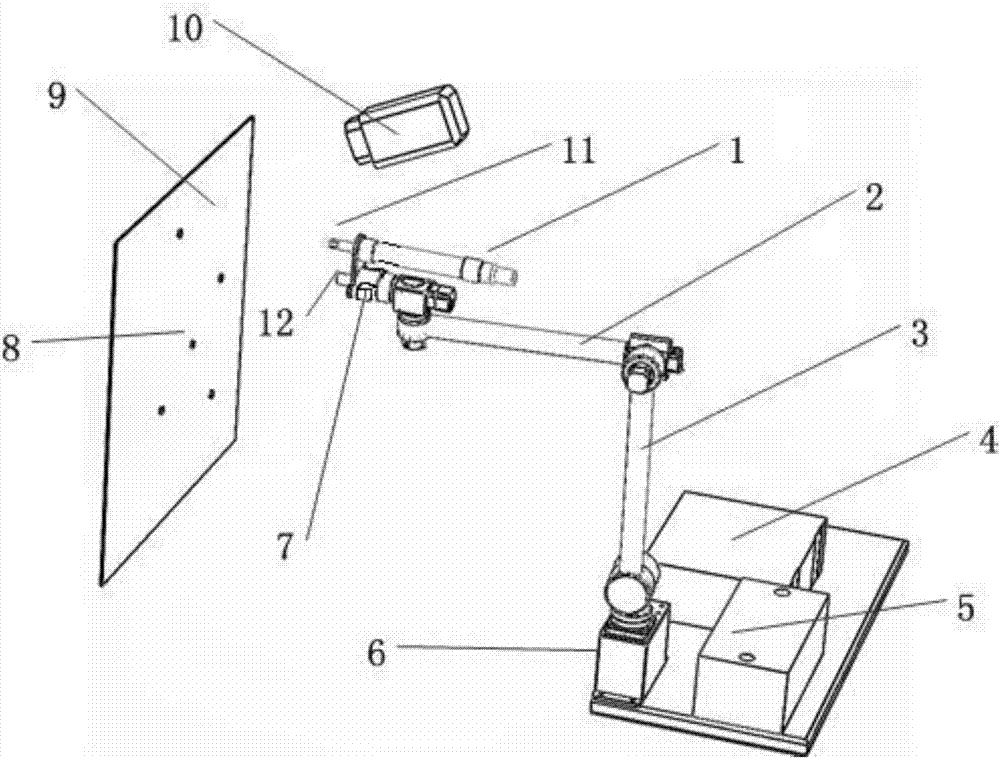
[0031] Such as figure 2 The shown schematic di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More