

Perturbation-observation-based self-learning engine torque control system and method thereof
An engine torque and torque control technology, applied in the field of self-learning engine torque control system, can solve the problems of long time to re-adjust PID control parameters, unsatisfactory engine torque tracking effect, and poor algorithm adaptive ability, so as to solve the problem of poor self-adaptability. , improve overshoot and lag problems, reduce the effect of modeling work
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
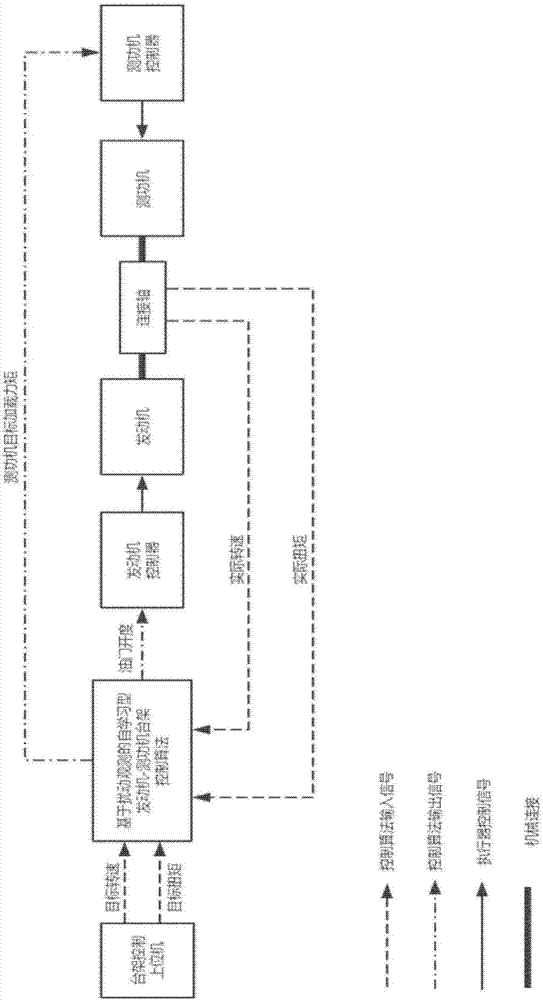
[0032]The disclosure provides a self-learning engine torque control system and method based on disturbance observation. The disclosure proposes an engine that combines active disturbance control (Active Disturbance Rejection Control, ADRC) and dynamic feedforward control (Dynamic Feedforward Control, DFF) Torque control method. On the one hand, the dynamic model from the control target (engine output torque) to the control input (throttle opening) is directly established, and this model is used in the design of feedforward control; on the other hand, since the engine is a very complex nonlinear system , and the engine will be disturbed by various uncertainties from inside and outside the system during operation, it is difficult to obtain an ideal control effect only by relying on feedforward. Therefore, on the basis of feed-forward control, an ADRC feedback control unit is designed for engine torque control. ADRC is composed of P control module and Extended State Observer (Ex...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More