Autonomous vehicle steering control system
An automobile steering control and automatic driving technology, applied in the field of automatic driving system, can solve the problem of lack of transformation data detection and feedback ability of steering drive auxiliary mechanism, threat to vehicle operation and operation safety and reliability, and deviation of wheel steering and direction steering operation Increase and other problems, to achieve high detection accuracy and operation automation, improve operational flexibility and sensitivity, and improve accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
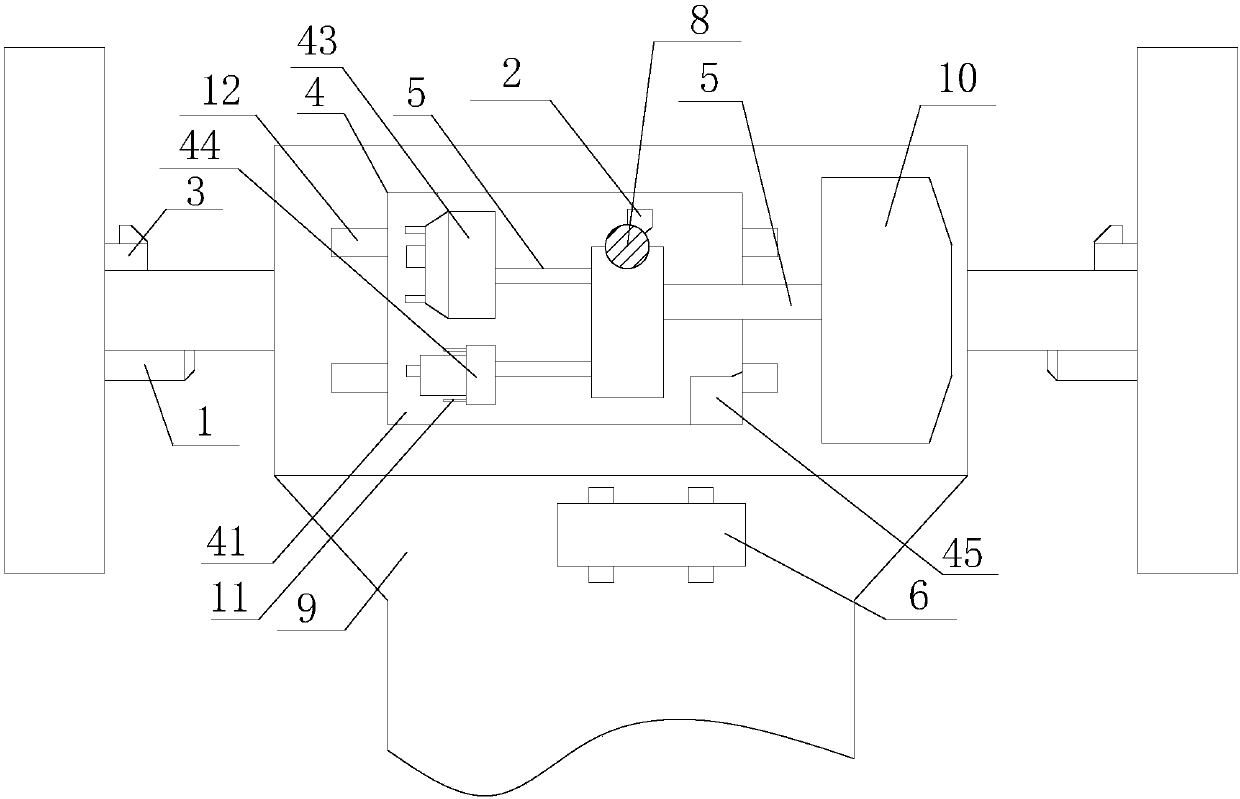
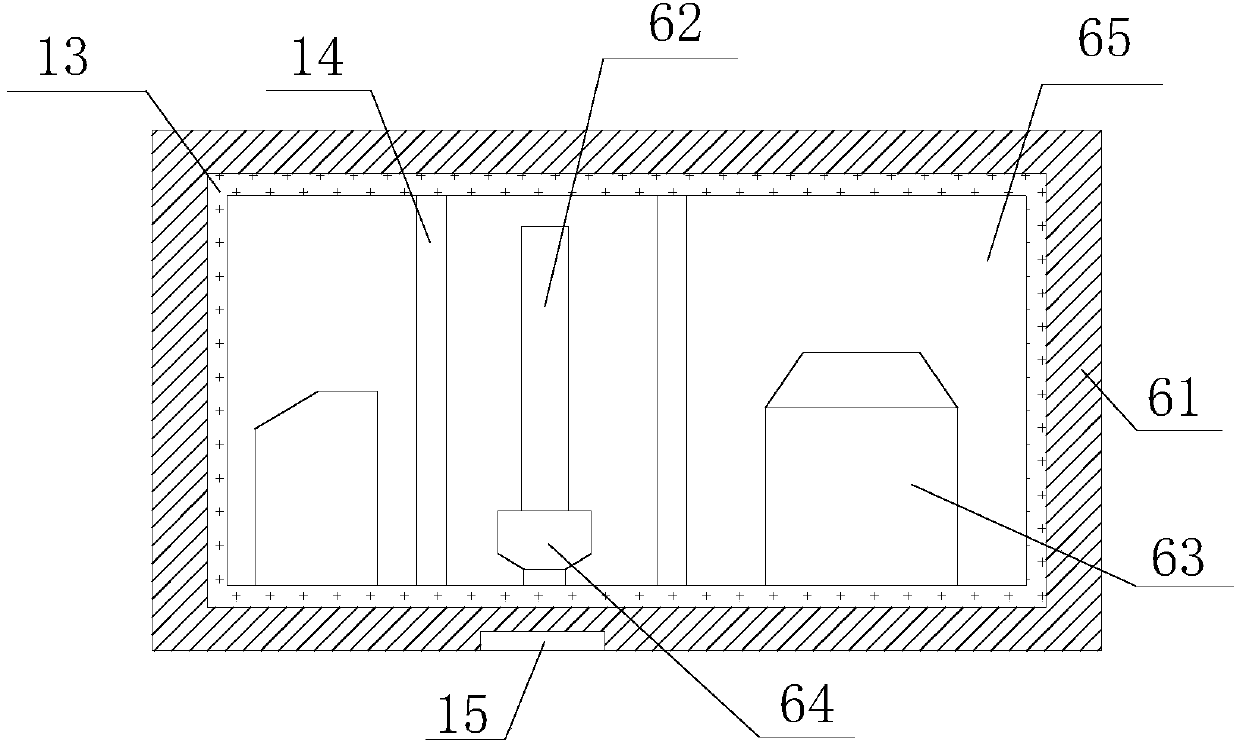
[0022] Such as figure 1 Shown in -3, a kind of autopilot vehicle steering control system, comprises speed sensor 1, main angle sensor 2, auxiliary angle sensor 3, steering drive mechanism 4, power transmission shaft 5 and controller 6, wherein speed sensor 1 and auxiliary angle sensor 3 are at least two, respectively installed on the wheel shaft 7 of the steering wheel of the automobile, the main angle sensor 2 is connected with the vehicle steering wheel shaft 8 and the steering drive mechanism 4, the steering drive mechanism 4 is installed on the vehicle frame 9, and is connected to the steering wheel through the transmission shaft 5 is connected with the vehicle steering drive mechanism 10 and the vehicle steering wheel shaft 8, the controller 6 is installed on the vehicle frame 9, and is connected with the speed sensor 1, the main angle sensor 2, the auxiliary angle sensor 3, the steering drive mechanism 4, and the vehicle power supply respectively. Electric circuit and ca...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com