Visual robot data acquisition and processing system
A technology of data collection and processing and vision system, which is applied in the field of visual robots, can solve the problems of poor processing effect and slow processing speed, and achieve the effect of reducing the amount of data and meeting the real-time requirements of the system
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
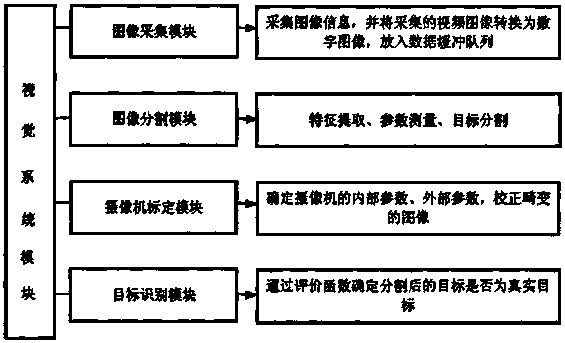
[0011] Such as figure 1 As shown, the visual robot data acquisition and processing system of the present invention includes an image acquisition module communicating with the vision system module, which is composed of image acquisition equipment such as a camera and an image acquisition card, and completes the on-site image acquisition taken by the camera to become a video image. Then convert the video image into a digital image through the image acquisition card, and store it in the buffer queue for visual processing;
[0012] And the image segmentation module that communicates with the vision system module, which is based on the color image segmentation of the color, performs the steps of feature extraction, parameter measurement, and target segmentation through the selected image segmentation method, and divides the image according to the principle of similarity and consistency Complete image segmentation for many regions with similar characteristics;
[0013] And the came...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com