

Precise three-dimension hand and human body attitude estimating method based on single depth image
A technology of depth image and human pose, applied in the field of 3D hand and human pose estimation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0033] It should be noted that, in the case of no conflict, the embodiments in the present application and the features in the embodiments can be combined with each other. The present invention will be further described in detail below in conjunction with the drawings and specific embodiments.
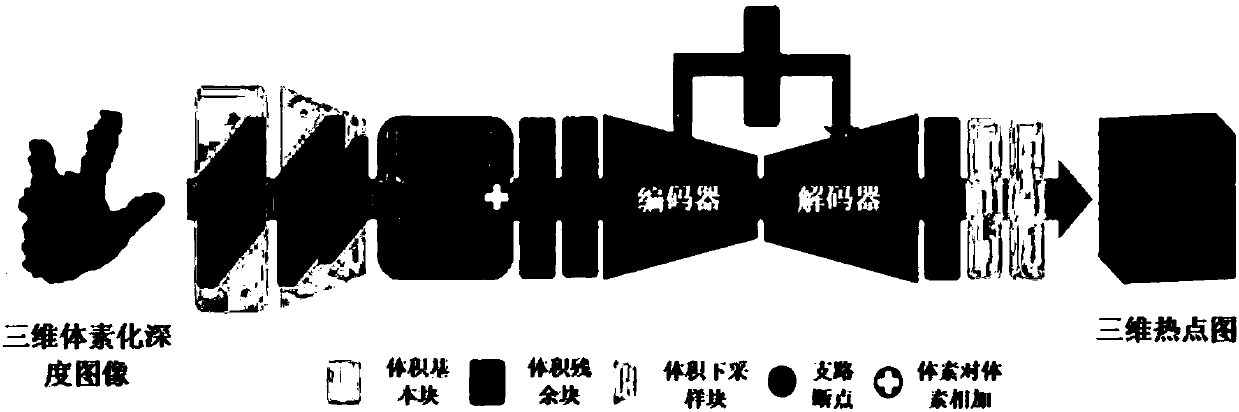
[0034] figure 1 It is an overall architecture diagram of a voxel-to-voxel prediction network for an accurate 3D hand and human pose estimation method based on a single depth image of the present invention. First, by back-projecting the points into the 3D space and discretizing the continuous space, the 2D depth map is transformed into a 3D volume representation; then, the 3D voxelized data is used as the input of the voxel-to-voxel prediction network , used to estimate the likelihood value of each voxel of each joint; finally, find out the position corresponding to the maximum likelihood value of each joint and the real coordinates it represents, and use this as the final result of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More