

Omnidirectional intelligent mobile equipment positioning and navigation method based on laser ranging
A technology of mobile equipment and laser ranging, which is applied in the direction of measuring devices, electromagnetic wave re-radiation, radio wave measurement systems, etc., to achieve the effects of reasonable design, reduced operating costs, and enhanced diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0055] In order to make the solution of the present invention clearer, the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments:
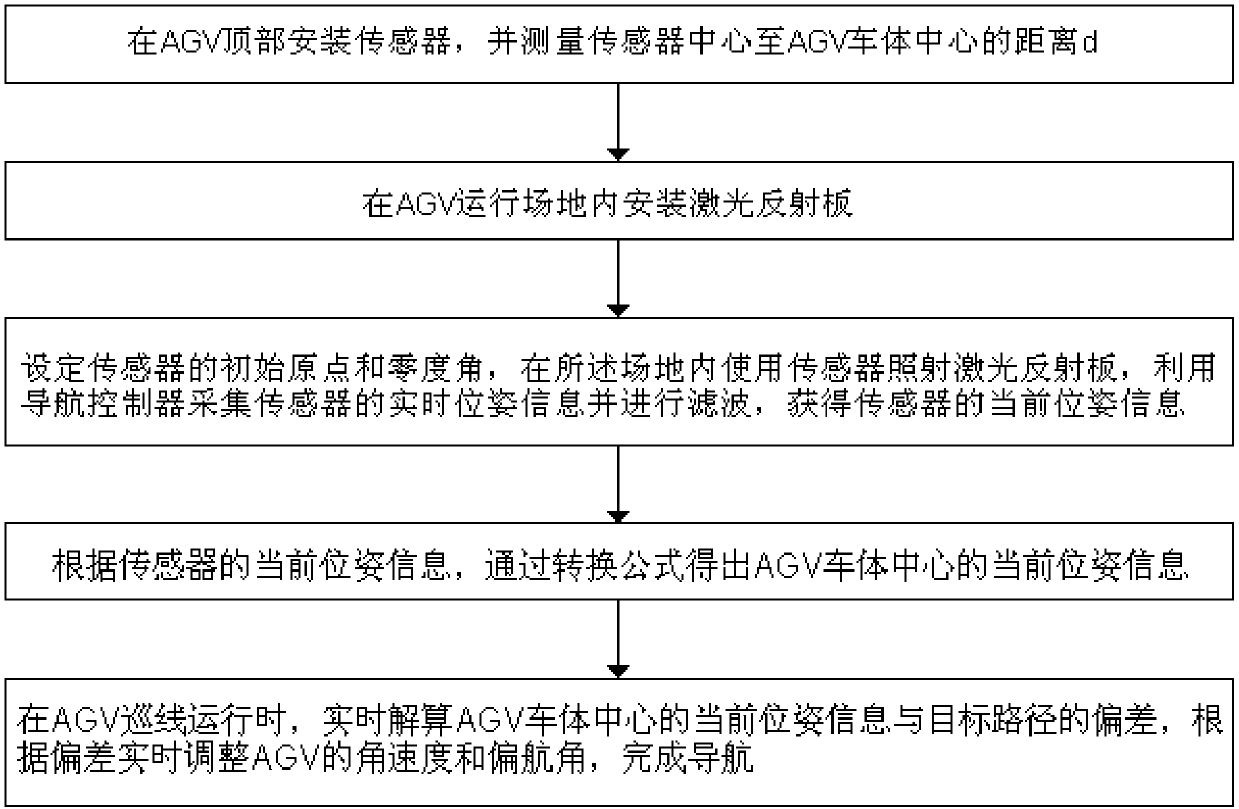
[0056] Such as figure 1 As shown, an omnidirectional intelligent mobile equipment positioning and navigation method based on laser ranging includes the following steps:
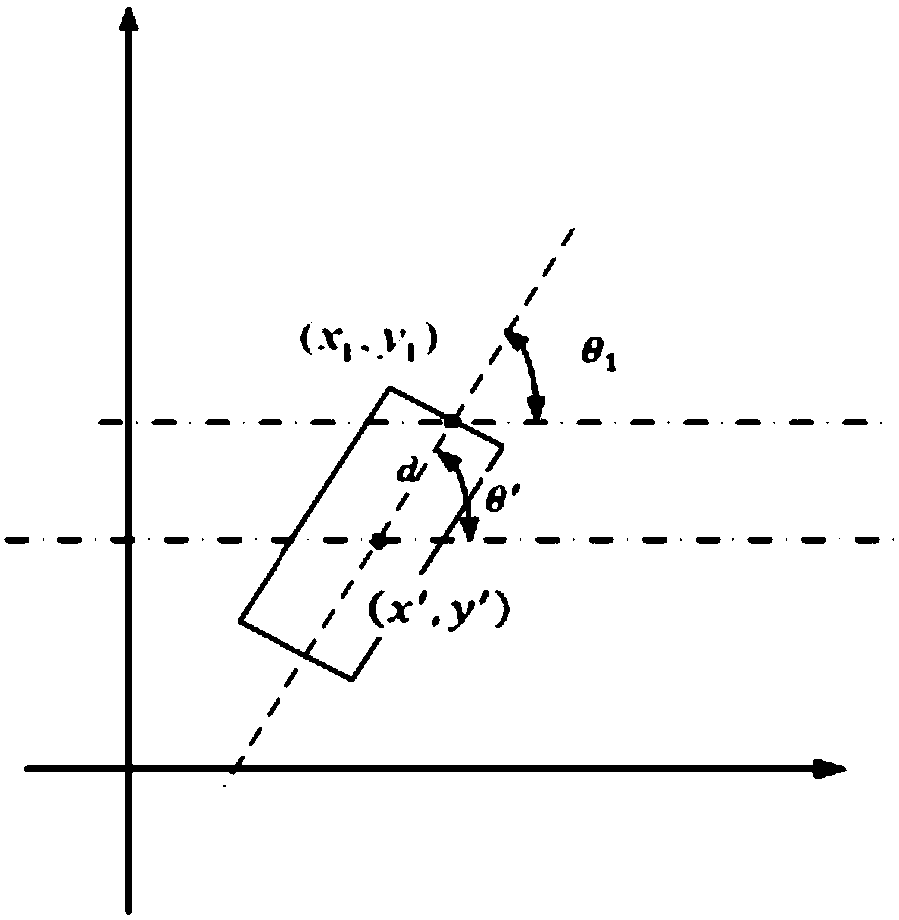
[0057] The first step is to install the sensor on the top of the AGV and measure the distance d from the center of the sensor to the center of the AGV body;
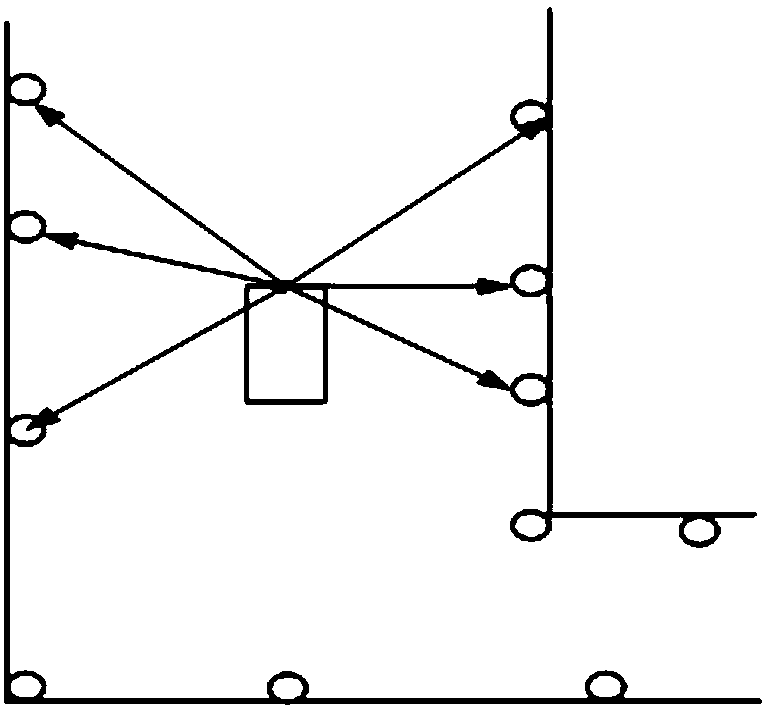
[0058] The second step is to install laser reflectors in the AGV operating site, so that the sensor can illuminate no less than 3 laser reflectors at any time;
[0059] The third step is to set the initial origin and zero angle of the sensor, use the sensor to irradiate the laser reflector in the site, and use the navigation controller to collect the real-time pose information of the sensor and perform filtering to obtain the current pose information of the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More