

Operation method for unscrewing screws with human-machine cooperation by utilizing space manipulator operation system
A technology of an operating system and an operating method, which is applied in the field of space manipulator operation, can solve the problem of difficulty in realizing the grasping position and attitude control screw manipulator of electric tools, and achieves the effect of improving the operation success rate, reducing the work intensity, and overcoming the uncontrollable position and attitude.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
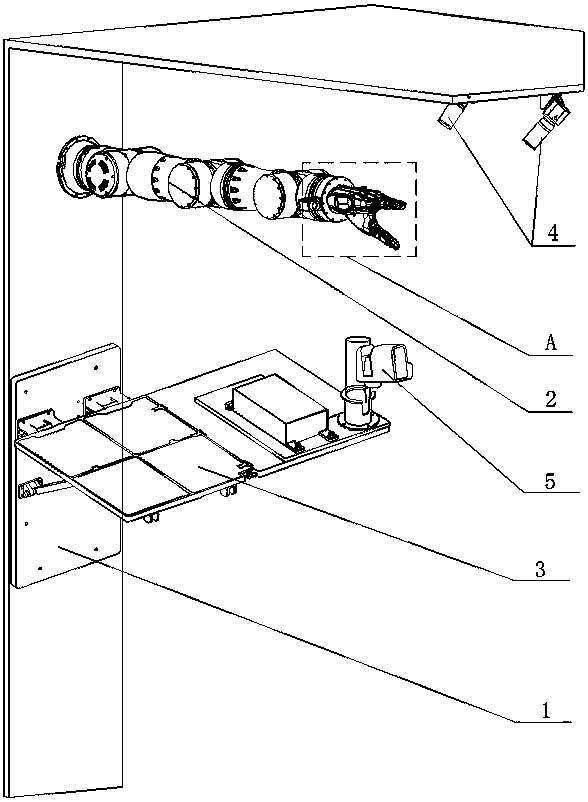
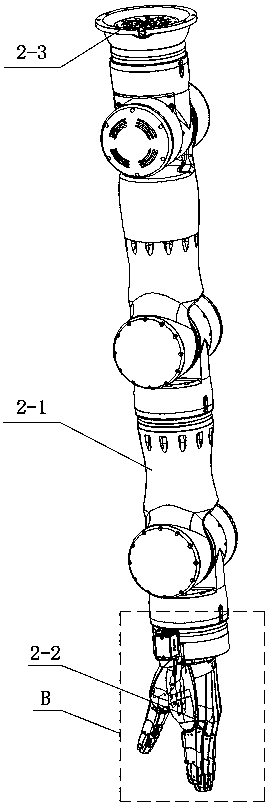
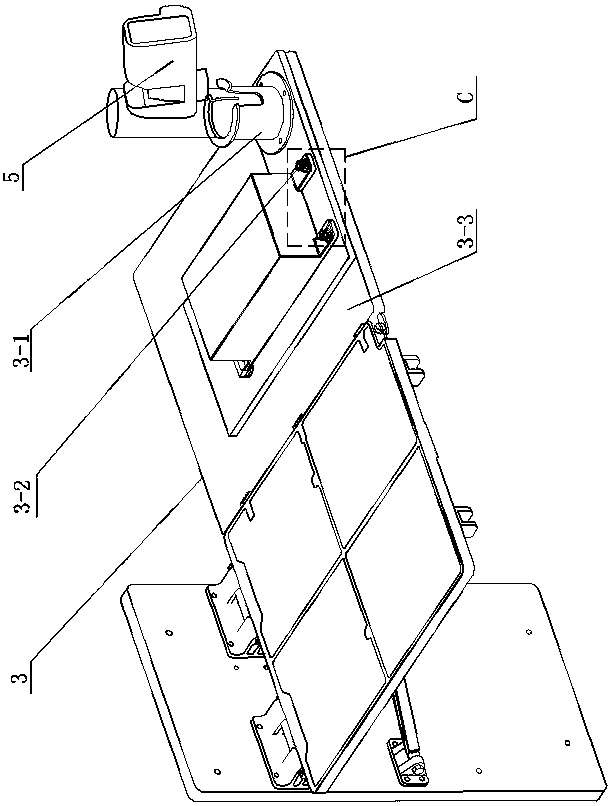
[0040] Specific implementation mode one: as Figure 1-Figure 10 As shown, this embodiment discloses a man-machine cooperative screw loosening operation method using a space manipulator operating system. The manipulator 2 described above includes a manipulator 2-1 (capable of operating in a wide range), a dexterous hand 2-2 (capable of grasping the end) and a connecting flange 2-3, the connecting flange 2-3, The mechanical arm 2-1 and the dexterous hand 2-2 are connected sequentially. The maintenance operation platform assembly 3 includes a power tool fixing cylinder 3-1, an operated screw 3-2 and a maintenance operation platform 3-3. The power tool The fixing cylinder 3-1 is fixed on the maintenance operation platform 3-3, the operated screw 3-2 is screwed on the maintenance operation platform 3-3, and the maintenance operation platform 3-3 is fixedly connected with the bracket 1; The connecting flange 2-3 is fixedly connected with the support 1, the manipulator 2 is located ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More