Multifunctional mobile robot and method for optimizing labyrinth path
A mobile robot and multi-functional technology, applied in the field of robotics, can solve the problems of loss of AGV utilization rate, limit the functionality of AGV trolleys, and not easy to change, and achieve the effects of environmental adaptability, durability, easy path optimization, and light adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0043] In order to better explain the present invention and facilitate understanding, the present invention will be described in detail below through specific embodiments in conjunction with the accompanying drawings.
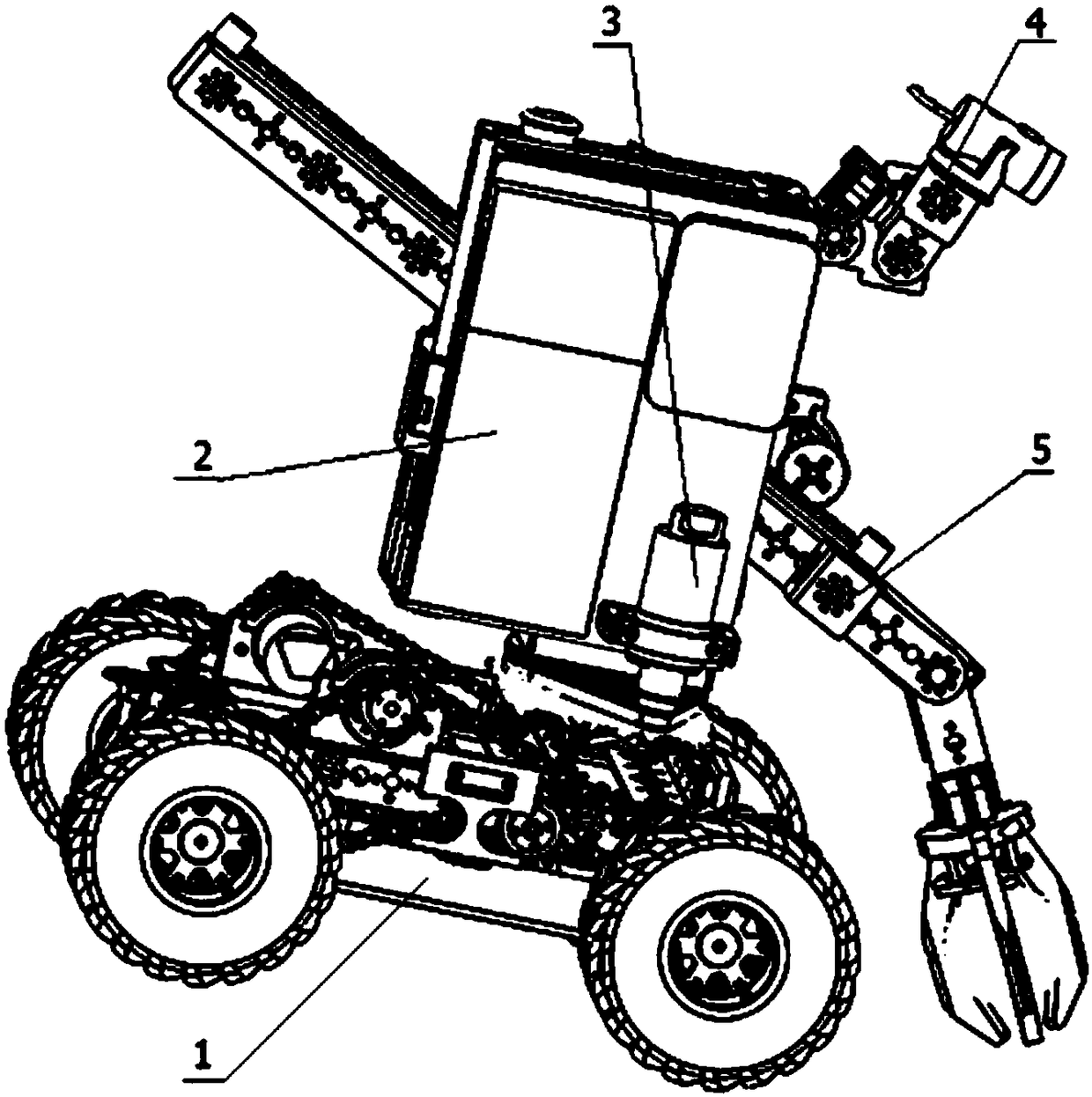
[0044] Such as figure 1As shown, the multifunctional mobile robot provided by the present invention includes a driving mechanism 1 , a car body 2 , a rotating mechanism 3 , an environment sensing system 4 and a gripping mechanism 5 . The driving mechanism 1 is connected with the vehicle body 2 through the rotating mechanism 3 . The clamping mechanism 5 is installed on the vehicle body 2, and the environmental sensing system 4 is arranged at a suitable position of the present invention according to the functions of its components.
[0045] The vehicle body 2 is a hollow structure, and the clamping mechanism 5 passes through the interior of the vehicle body 2 . The machine vision 41 is located above the clamping mechanism 5 , and its field of view can see the g...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More