Mobile mangosteen picking robot
A picking robot and mobile technology, applied in the direction of picking machines, harvesters, agricultural machinery and implements, etc., can solve the problems of less freedom, singleness, and insufficient pertinence.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] The present invention will be further described below in conjunction with accompanying drawing:
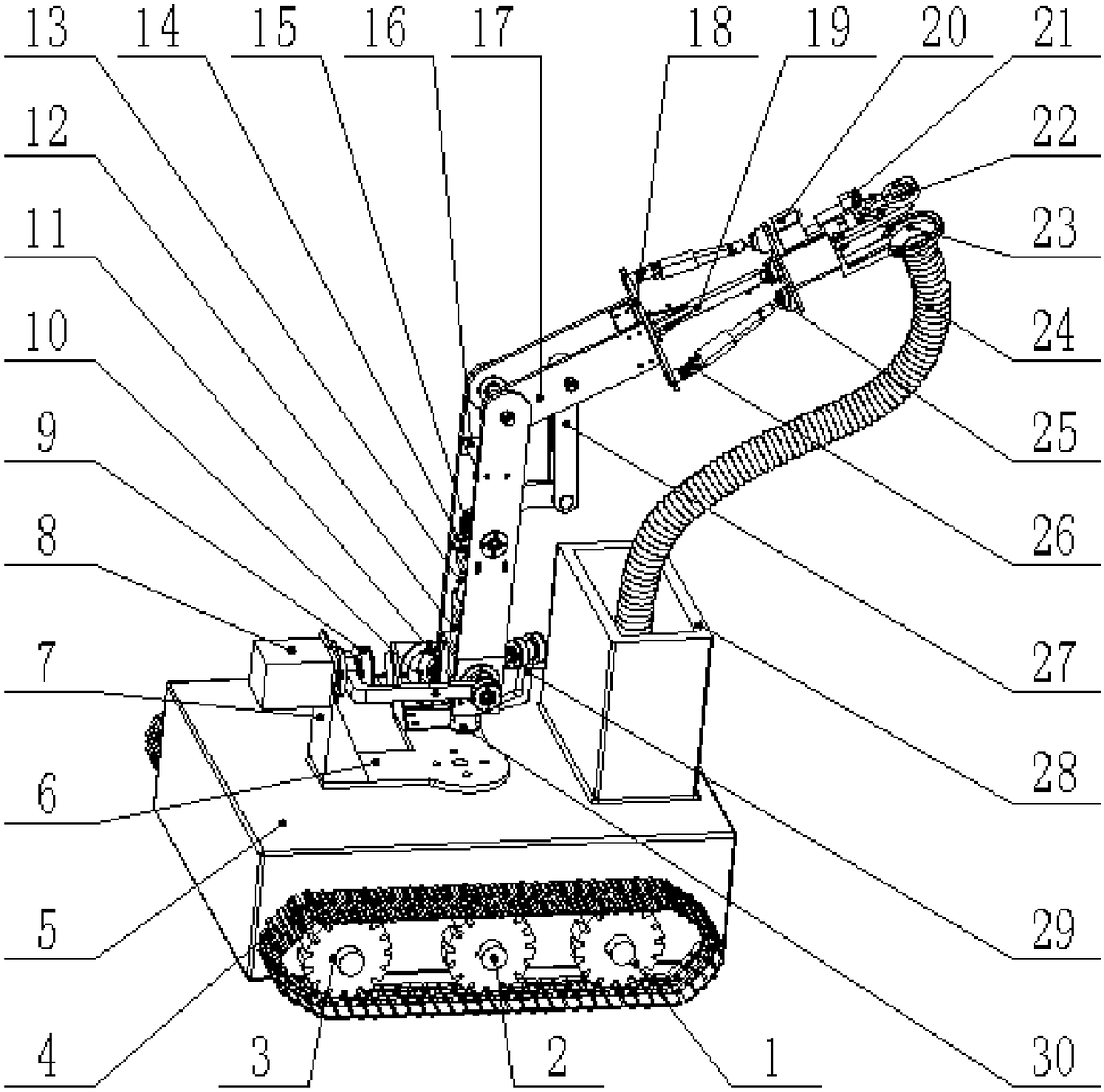
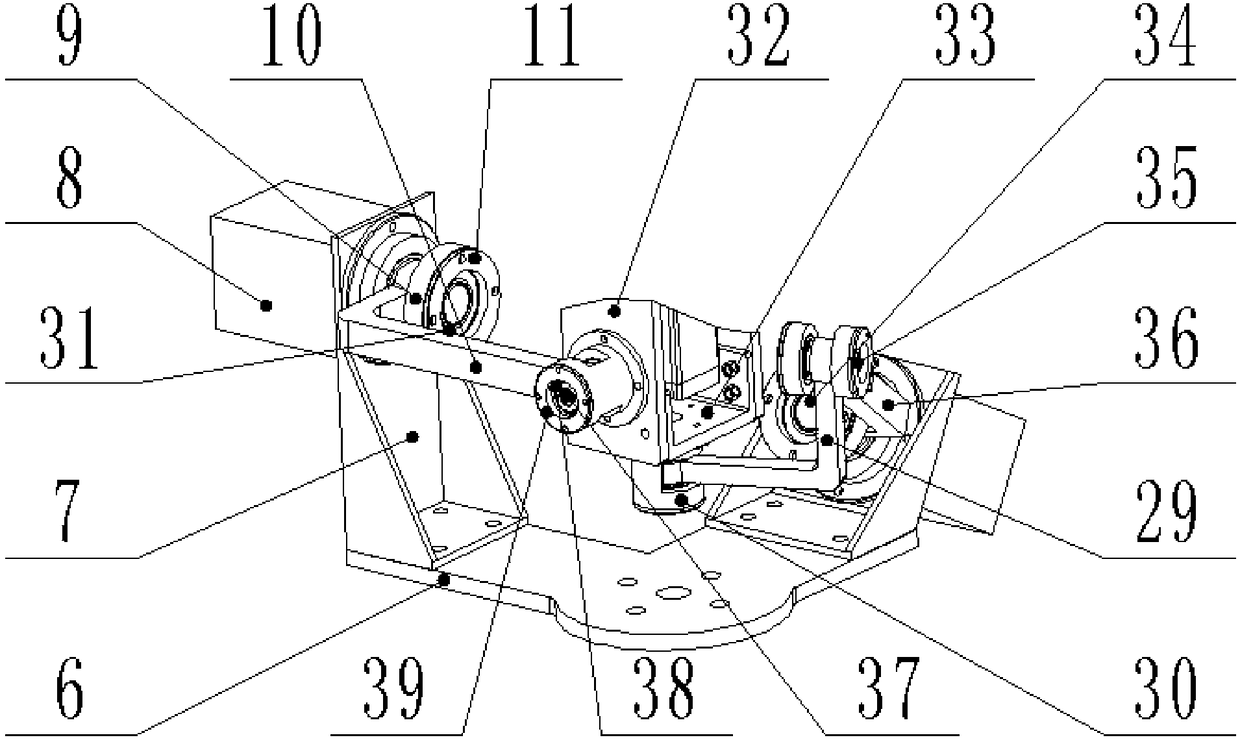
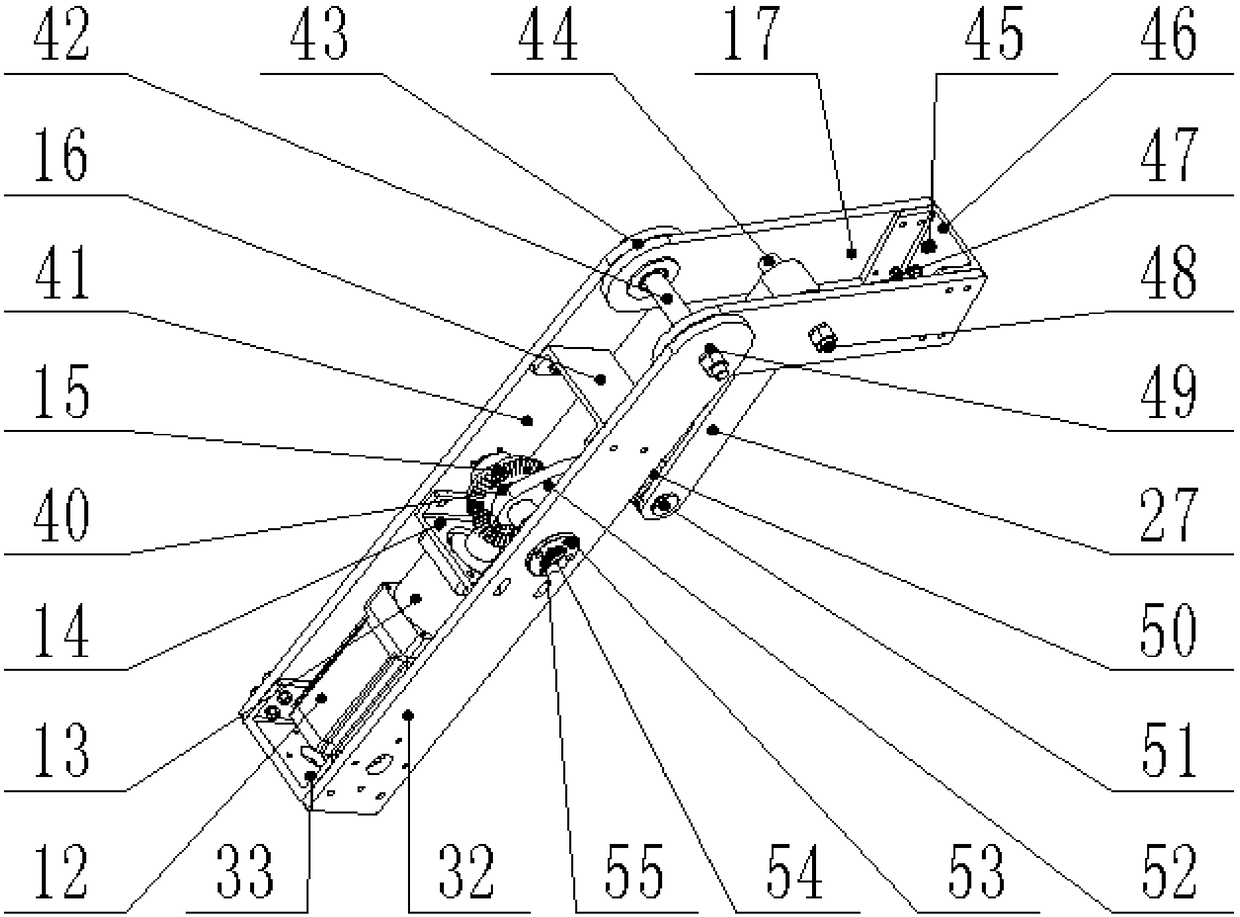
[0034] like Figure 1~5 As shown, a mobile mangosteen fruit picking robot includes a picking car module, a shoulder joint module, an elbow joint module, a wrist joint module and a cutting module. The picking car module is the basic positioning and moving part of the whole device; the shoulder joint module is fixed on the picking body 5 of the picking car module through the base plate 6; The kinematic chain bearing end block 30 of a kinematic chain is connected; the wrist joint module is fixed on the elbow joint module forearm connecting plate 46 by the static platform 18; the shear module is fixed on the wrist joint module by the shear motor bracket 62 On the moving platform 58.
[0035] The picking vehicle module includes picking vehicle body 5, rotating shaft 2, picking wheel 1, crawler drive motor, picking vehicle crawler belt 4, connecting key 3, fruit holding box 28 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com