

Quaternion-based attitude resolving method for extended Kalman filter algorithm
A technology of extended Kalman and filtering algorithm, applied in the field of attitude calculation of extended Kalman filtering algorithm, can solve the problem of unknown parameter calculation and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
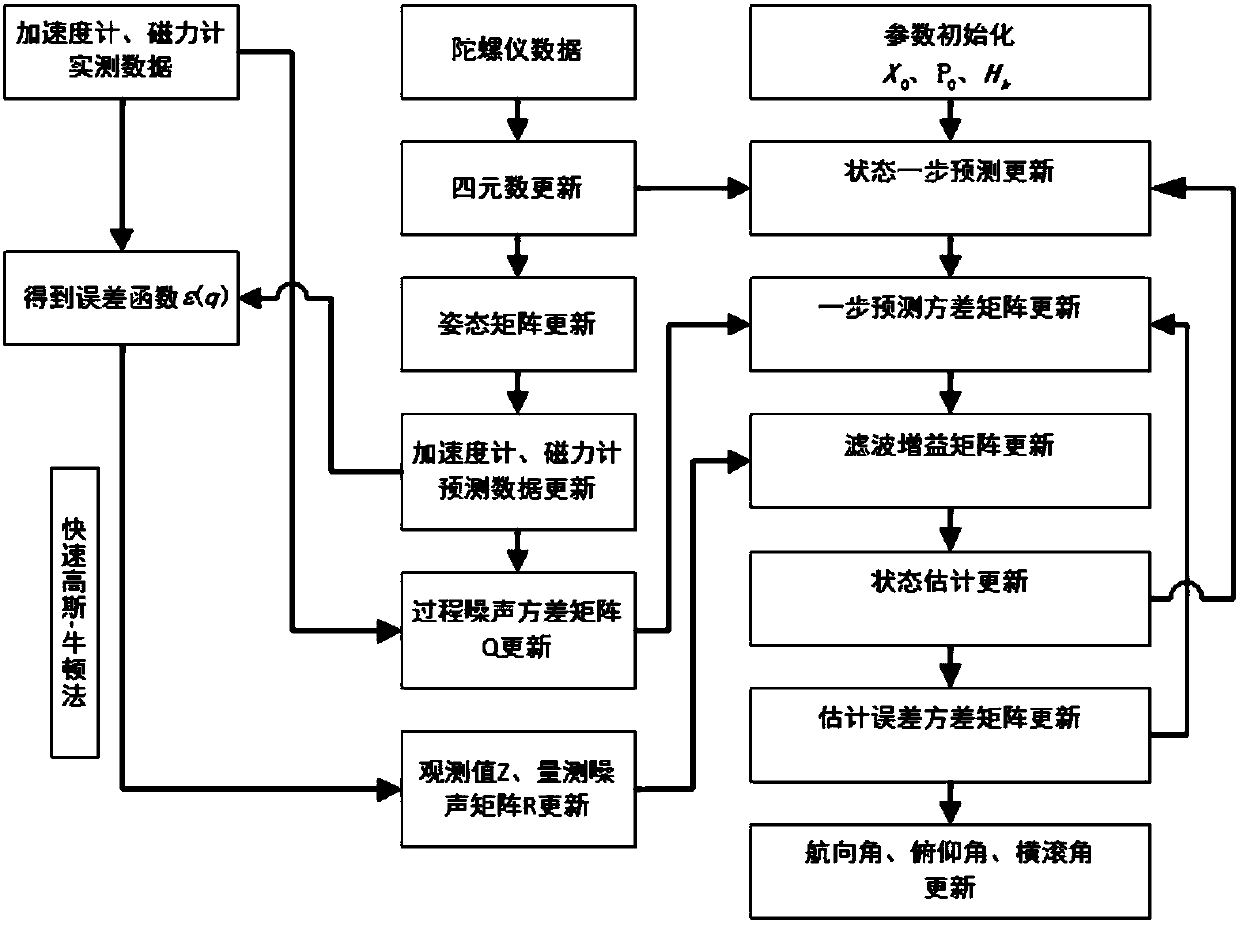
[0076] Such as figure 1 As shown, a kind of posture solution method of the extended Kalman filter algorithm based on quaternion of the present invention comprises the following steps:
[0077] Step 1: Build an attitude estimation system to obtain multi-axis sensor data in the carrier fixed reference system coordinate system;
[0078] Step 2: filter the collected acceleration data and magnetic induction data, and normalize the data collected by these two sensors;
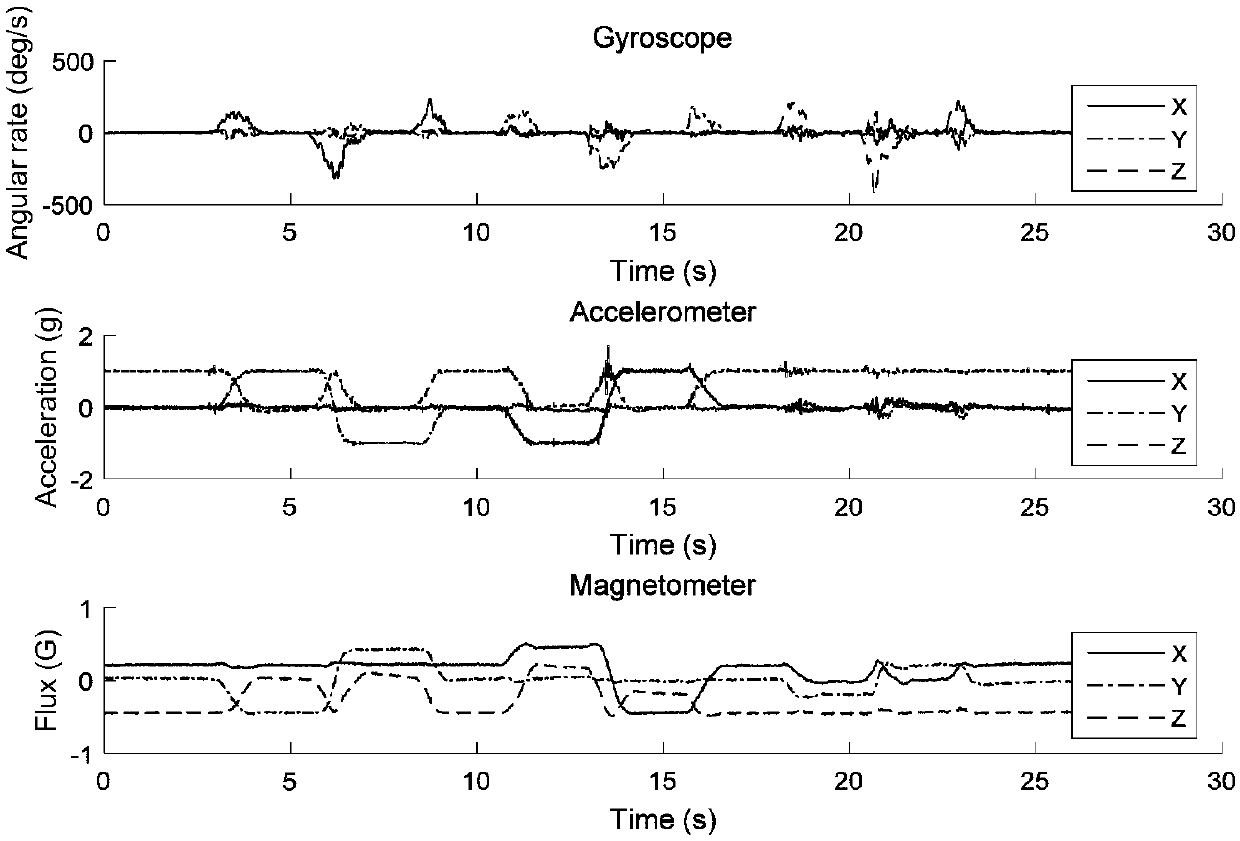
[0079] The data collected by the three-axis gyroscope is w=[w x w y w z ] T , the data collected by the three-axis accelerometer after normalization is a=[a x a y a z ] T , the data collected by the normalized three-axis magnetometer is m=[m x m y m z ] T ;
[0080] Step 3: Construct the state equation of the carrier system according to the quaternion differential equation and the attitude matrix, and obtain the process noise variance matrix of the system;
[0081] Step 4: Use the fast Gauss-Newto...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More