

Differential GNSS (Global Navigation Satellite System) and INS (Inertial Navigation System) adaptive tightly-coupled navigation method based on inertial measurement unit
A technology of inertial measurement and navigation method, which is applied in the field of joint navigation, and can solve the problems of increasing cumulative navigation error, affecting the accuracy of integrated navigation, reducing accuracy and reliability, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0119] Below in conjunction with accompanying drawing, the specific embodiment of the present invention is described in further detail.
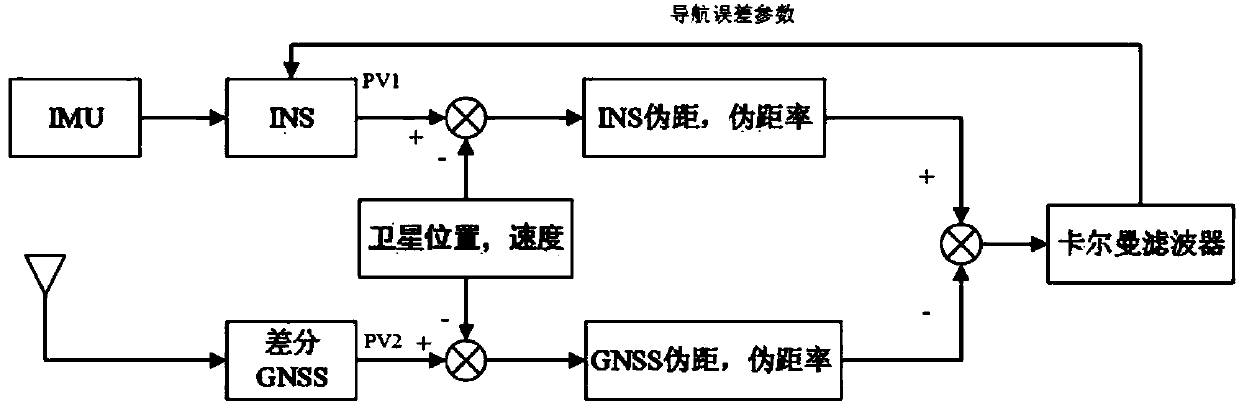
[0120] The present invention proposes a differential GNSS and INS self-adaptive tightly coupled navigation method based on an inertial measurement unit, which overcomes the deficiencies of existing navigation technologies, reduces the cost of system hardware, and ensures the accuracy and reliability of the navigation system in complex environments , the specific features are as follows: the attitude of the system model in the combined filtering state equation adopts Euler angles, and the device error adopts random walk, which is suitable for low-cost IMUs with large device errors and non-zero and unstable characteristics of device error characteristics; integrated navigation filtering The device uses UKF to update the quaternion form, which can describe the variance and expectation of the nonlinear system more accurately, and is also suitable...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More