

Fault tolerant proportional coordinated control method for multi-motor servo drive system under coupling control structure
A servo-driven, system fault-tolerant technology, applied in control systems, multiple motor speed adjustments, motor control, etc., can solve problems such as difficult to achieve online fast real-time fault tolerance, rarely consider motor faults at the same time, and complex fault-tolerant control algorithms, etc., to achieve The effect of avoiding system vicious accidents, ensuring proportional coordination, and simple detection algorithm
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
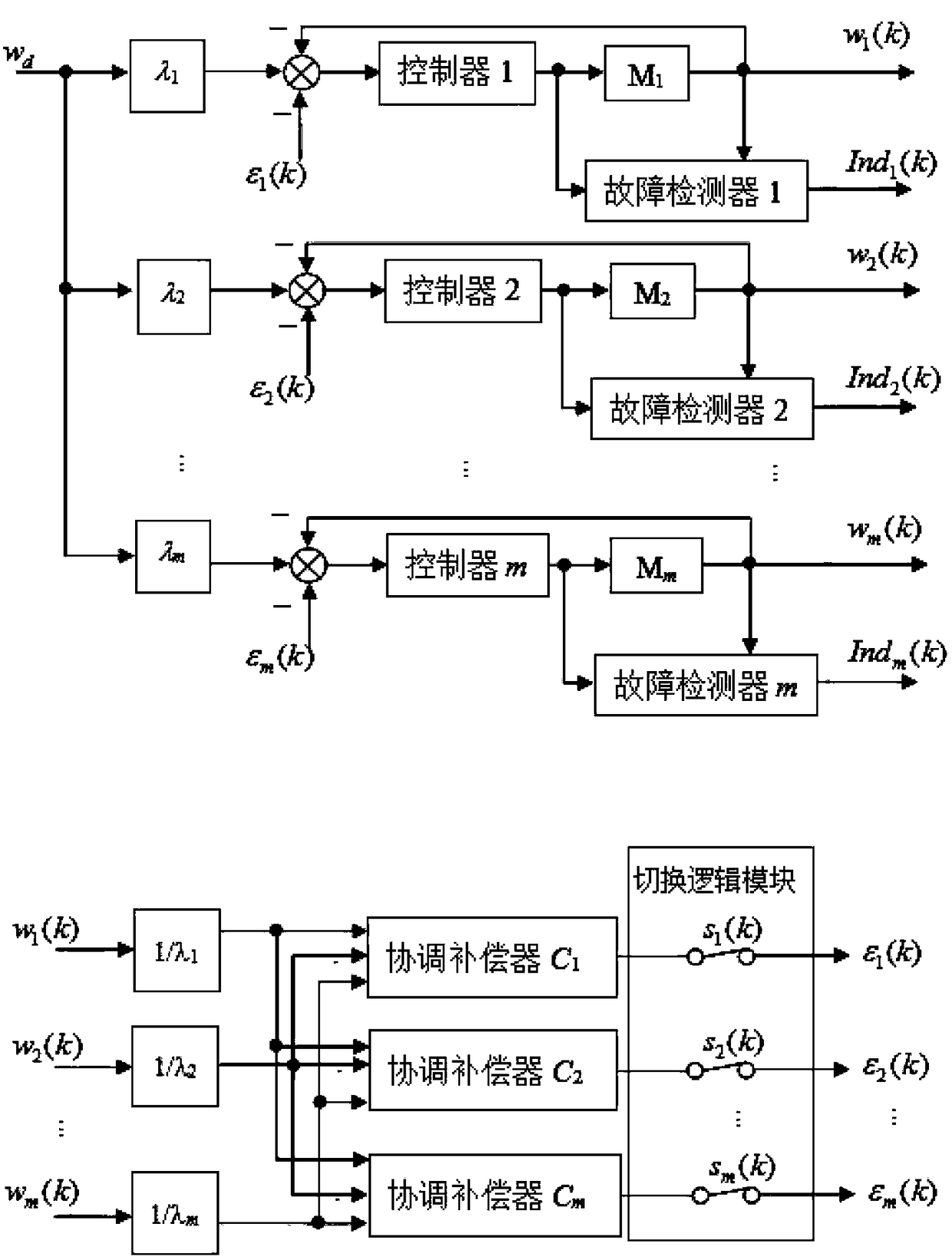
[0098] The following is an example of the design of the proportional coordination fault-tolerant control method under the deviation coupling control structure composed of three DC servo motor drive systems.
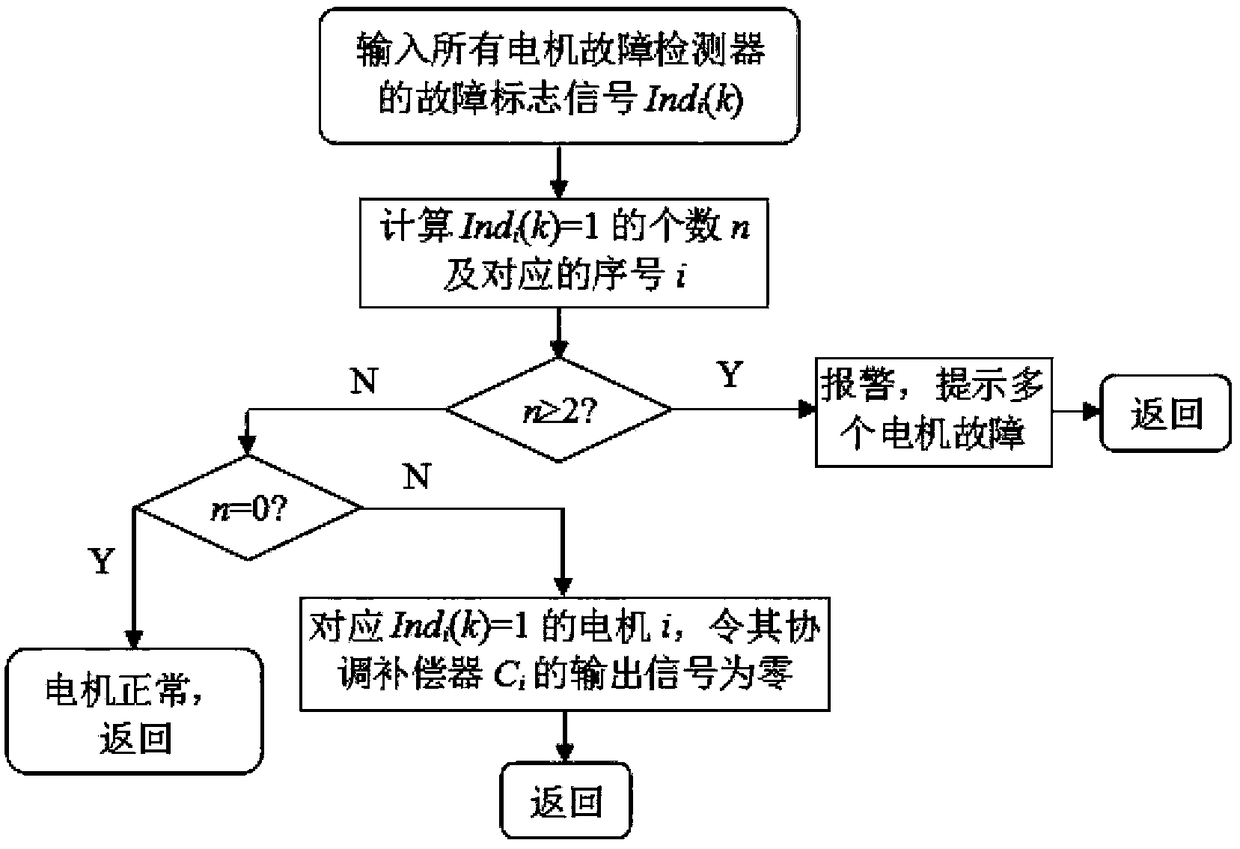
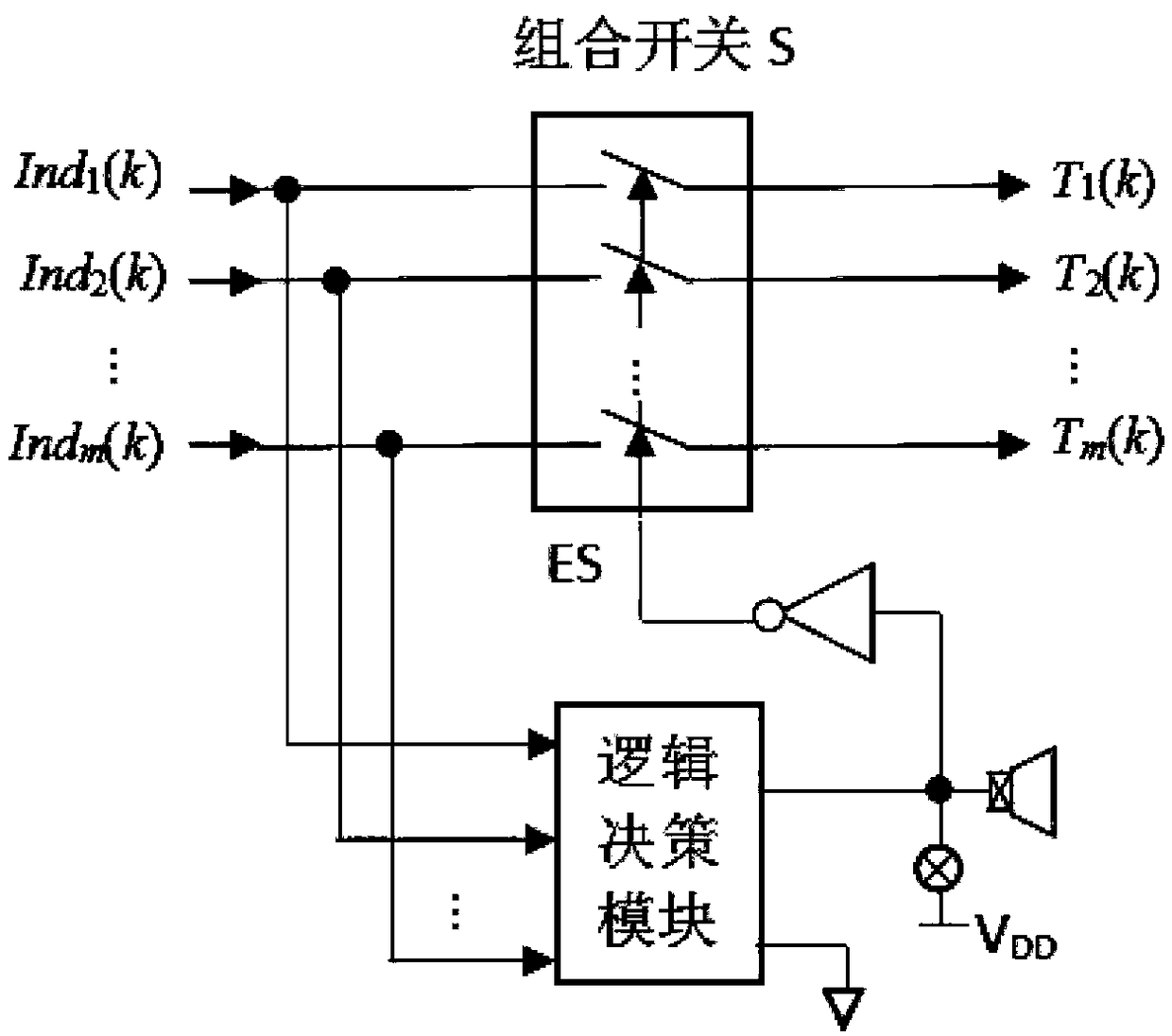
[0099] A fault-tolerant proportional coordinated control system of a three-motor servo drive control system with a coupled control structure, such as figure 1 shown. figure 1 In, λ 1 , lambda 2 and lambda 3 is the proportional coordination coefficient of the set three motor angular velocities, w d is the given amount of desired speed, ε i (k) is the output signal of the coordinated compensator, s 1 (k), s 2 (k) and s 3 (k) are the normally closed node switches set on the output channels of the coordination compensator respectively. The three fault detectors detect the faults of the motor and its electric drive module in the single motor control system in real time, and obtain the fault flag signal Ind i (k). The improved coordinated compensator according to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More