

A sliding mode control method for underwater robot based on extended state observer
An underwater robot and expansion state technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of robot control torque discontinuity, increase system energy consumption, destroy system accuracy, etc., to achieve Ease of engineering implementation, lower gain, and better control performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0029] The technical solution of the present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
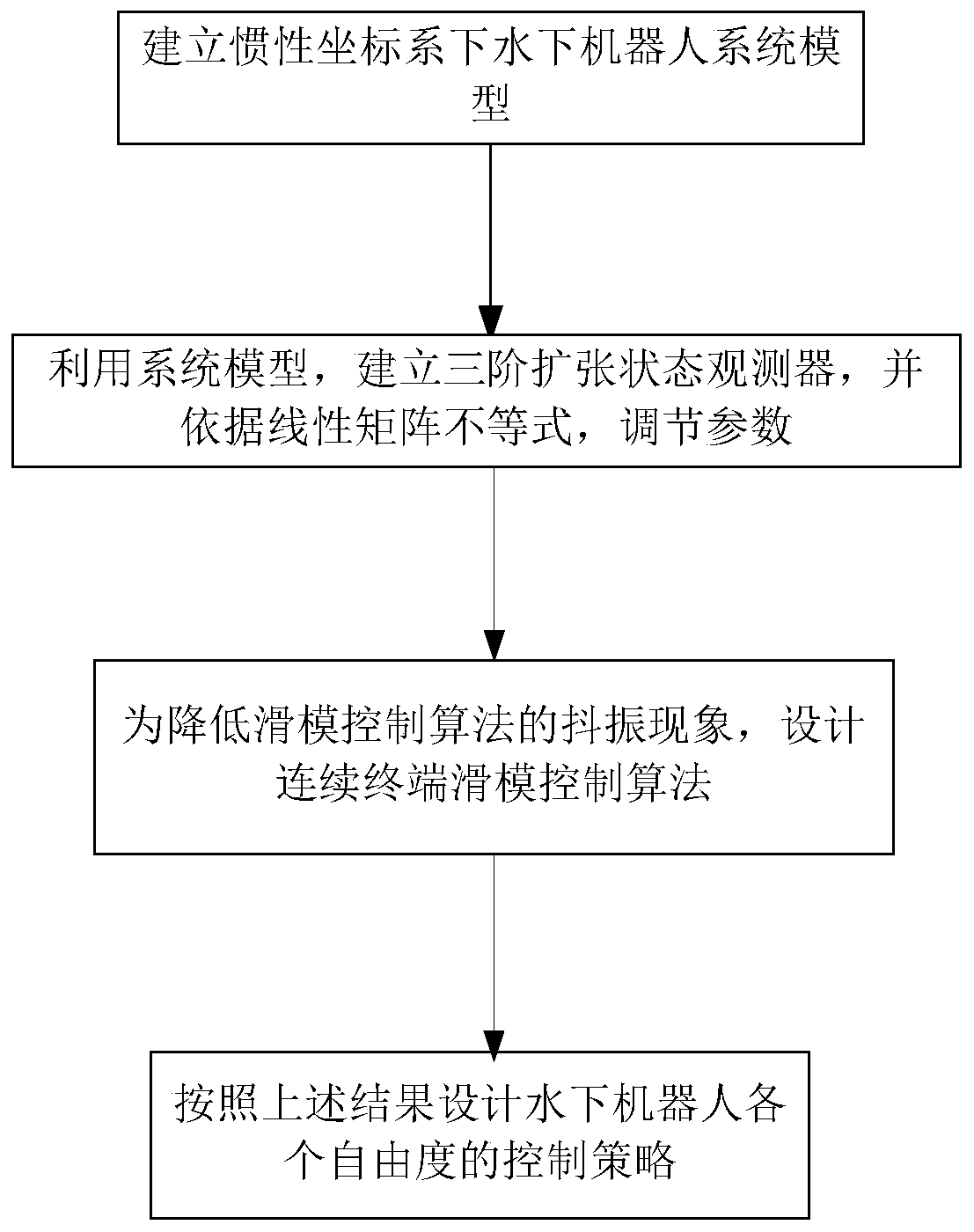
[0030] The present invention provides a sliding mode control method for underwater robots based on extended state observers, such as figure 1 shown, including the following steps:
[0031] Step S1, establishing the dynamics model and kinematics model of the underwater robot in the inertial coordinate system, respectively:
[0032]
[0033]
[0034] where M RB Denotes the body inertia matrix, denote C RB Body Coriolis force matrix, M AM Indicates the inertia matrix of the water flow medium related to the body, C AM Represents the Coriolis force matrix of the water flow medium related to the body, D r (v r (t))v(t) is viscous drag, g(η(t)) is negative buoyancy, τ c (t) is the control torque, J(η(t)) is the Jacobian matrix, η(t), v(t) and v r (t)=v(t)-v c (t) are the position of the body in the body coordin...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More