

Method and system for vehicle Anti-collision pre-warning based on binocular stereo vision
A binocular stereo vision and anti-collision technology, which is applied in the field of automobile anti-collision technology, can solve the problems of scalability and poor versatility, and achieve the effects of strong anti-interference ability, reduced front-end calculation amount, and low precision requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to enable those skilled in the art to better understand the present invention, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0037] First an explanation of the terms used in this paper is given.
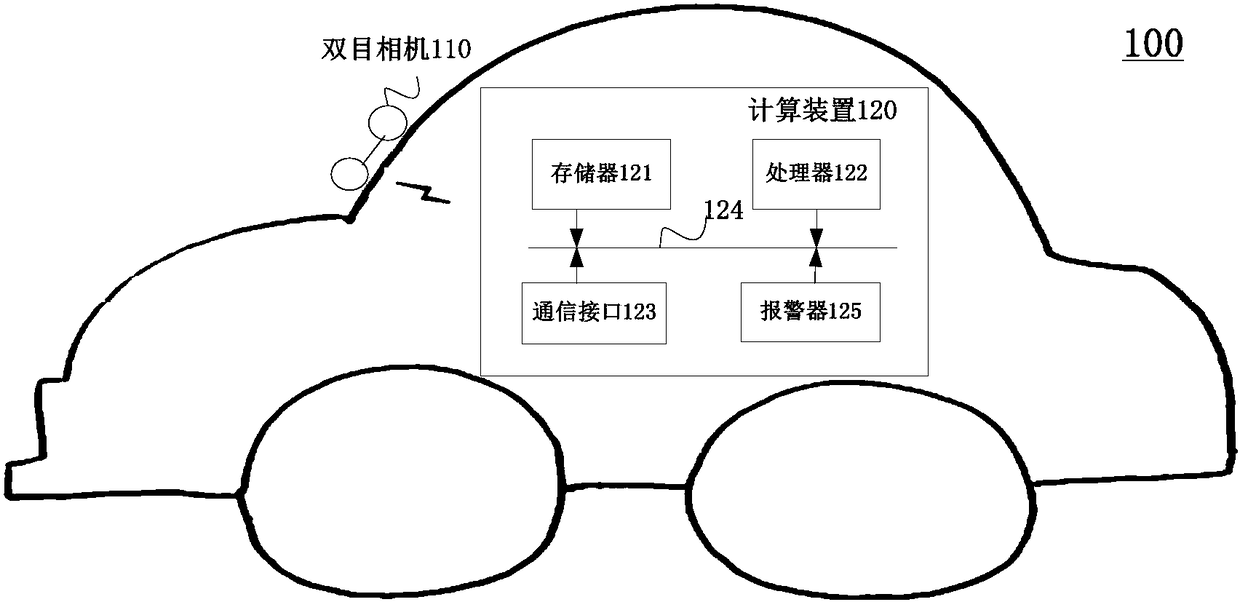
[0038] Disparity map: The disparity map is based on any image in the image pair, its size is the size of the reference image, and the element value is an image of the disparity value. The disparity map contains the distance information of the scene. The disparity map can be calculated from the left and right images captured by the binocular camera. The coordinates of a certain point in the ordinary two-dimensional disparity map are represented by (u, v), where u is the abscissa and v is the ordinate; the pixel value of the pixel at the point (u, v) is represented by d(u, v), The pixel value represents the disparity at that point (u,v). Image matching, which extracts disparit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More