

Modular multi-degree-of-freedom underactuated bionic prosthetic hand
An underactuated, degree-of-freedom technology, applied in the direction of artificial arms, etc., can solve the problem that the operation mode cannot be realized
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] specific implementation plan
[0057] The present invention will be further described below in conjunction with accompanying drawing.
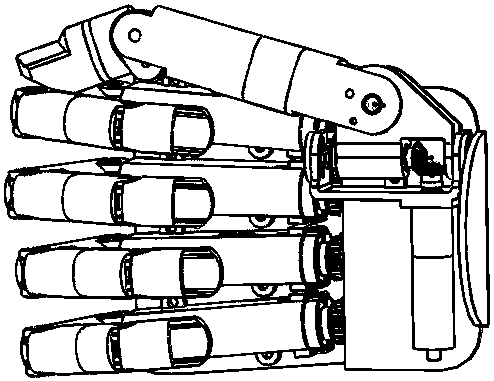
[0058] The invention provides a modular multi-degree-of-freedom underactuated bionic prosthetic hand such as Figure 8 As shown, apparently, its little finger 81, ring finger 82, middle finger 83, index finger 84, and thumb 86 are connected to the palm link 85 respectively. Its mechanical structure of described little finger 81, ring finger 82, middle finger 83 and forefinger 84 is identical, and just knuckle length is different, for narration convenience, be referred to as finger to be distinguished from thumb.
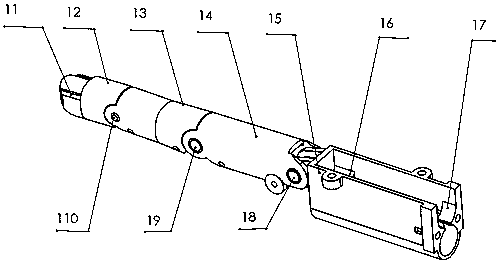
[0059] figure 1 Shown is the structure of the finger body, the first knuckle 14 of the finger is connected to the distal end of the finger base 15 through the first knuckle pin 18 of the finger, and can rotate around the centerline of the first knuckle pin 18 of the finger; the second knuckle of the finger 13 is connected t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More