

Bridge crane anti-swing method based on first-order dynamic sliding mode variable structure
A sliding-mode variable structure and dynamic technology, which is applied to load suspension components, instruments, adaptive control, etc., can solve the problems of not taking into account the chattering phenomenon of sliding mode control, the existence of chattering, and the cumbersome design steps of the control rate.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
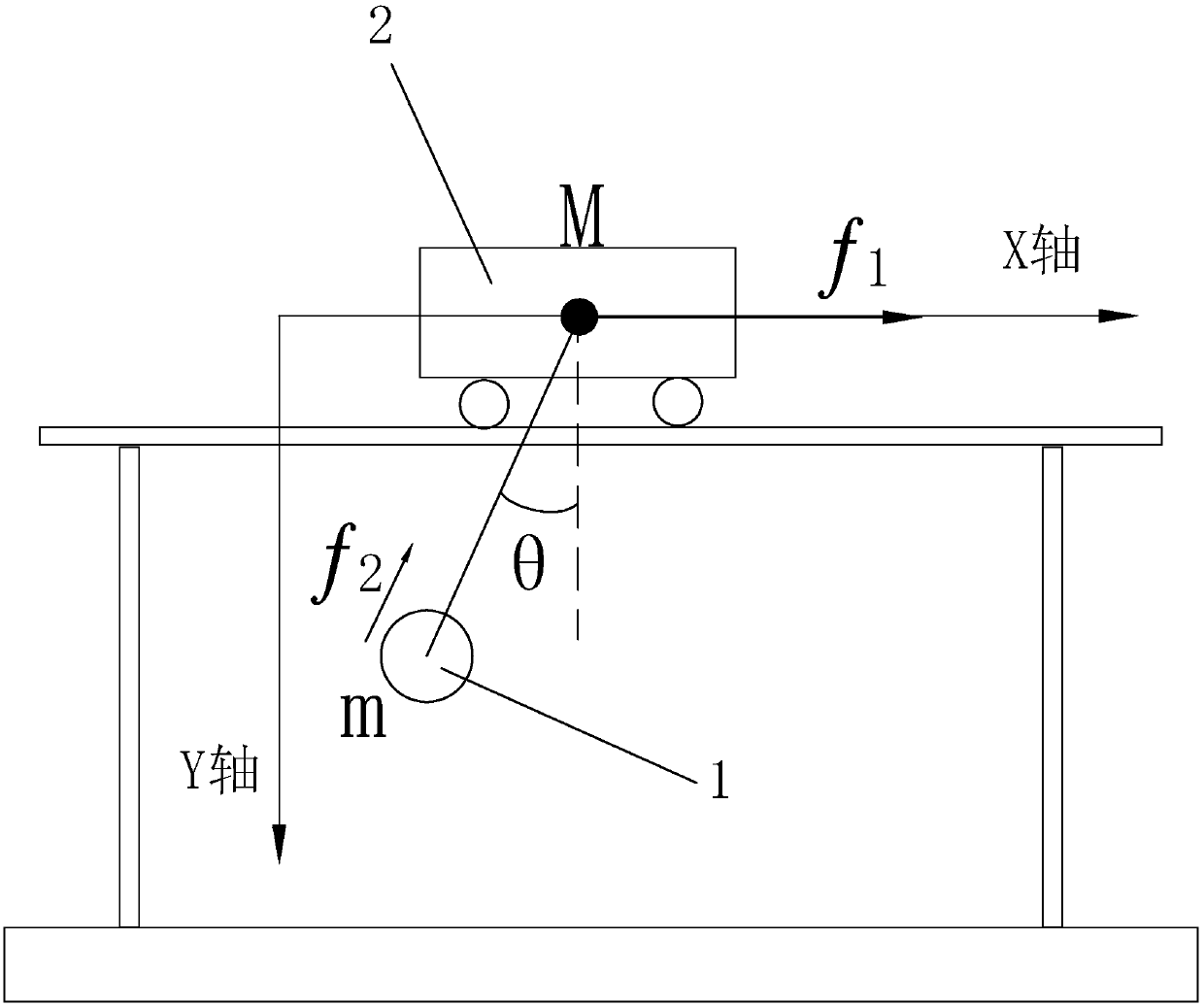
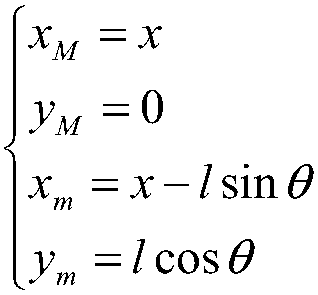
[0046] refer to figure 1 - figure 2 , the bridge crane anti-swing method based on the first-order dynamic sliding mode variable structure of the present invention, aiming at the control problem of the two-dimensional underactuated bridge crane under the condition of variable rope length, will contain two dynamic changes of the swing angle and the dynamic change of the rope length. The dynamic sliding mode surface s of the crane position is obtained by differential processing of the sliding mode surface 1 and rope length dynamic sliding mode surface s 2 , due to the dynamic sliding mode surface s of the crane position 1 and rope length dynamic sliding mode surface s 2 and the control input of the control model of the crane system, that is, the horizontal traction force f 1 and along-rope traction f 2 Therefore, the continuous dynamic sliding mode control law in time is obtained, thereby realizing the anti-swing positioning control of the overhead crane system, and effecti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More