

Constant-force-adjustable multi-freedom-degree flexible micro-gripper
A degree of freedom, micro-clamping technology, used in workpiece clamping devices, manufacturing tools, etc., can solve the problems of the micro-gripper being unable to output constant force, aggravating the deflection of the operated object, and unable to change the constant force, etc., to achieve machining accuracy. The effect of easy to guarantee, light structure and convenient operation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The specific embodiments of the present invention will be further described in detail below with reference to the accompanying drawings. It should be noted that the specific embodiments are only detailed descriptions and are not intended to limit the present invention.
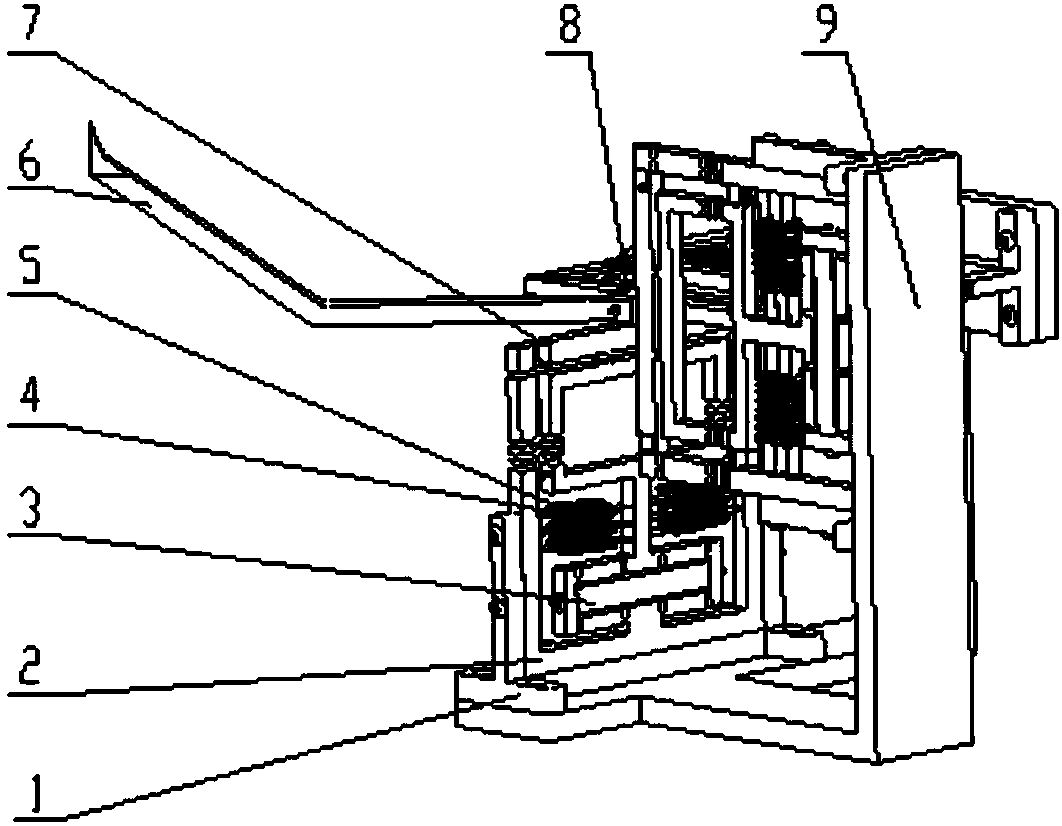
[0036] The invention provides a multi-degree-of-freedom flexible micro-gripper with adjustable constant force, including a micro-gripping unit, such as figure 1 As shown, the micro-clamping unit includes a clamping member 6 and a degree of freedom adjustment member. The clamping member 6 is mounted on the degree of freedom adjustment member and can be driven by the degree of freedom adjustment member to achieve up and down, left and right, and front and rear directions. Move, the clamping part 6 is connected with the degree of freedom adjustment part through a connecting block 8. The degree of freedom adjustment part is fixed on the base 9 on the different surface through the base 1, so that the degree of fr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More