

Drifting detection underwater robot device and control method
A technology of an underwater robot and a control method, which is applied to underwater operation equipment, program-controlled manipulators, manipulators, etc., can solve the problems of low rudder efficiency, easy to be affected by water flow, hours to dozens of hours, etc., and achieves low power consumption. power consumption, ensure stability and flexibility, and the effect of long battery life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
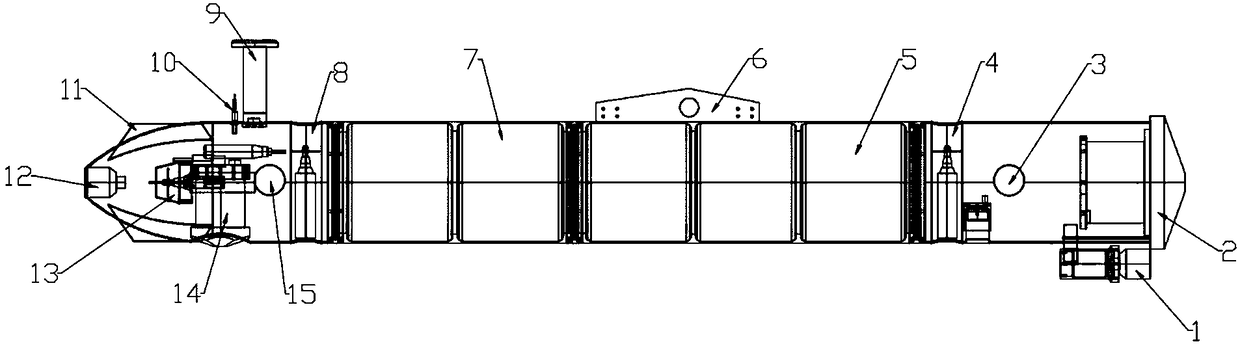
[0030] Drifting detection underwater robot device includes bow ranging sonar 1, acoustic Doppler profile velocimeter 2, ranging sonar-3, bow vertical thruster-4, battery compartment 5, retractable lifting point 6, control cabin 7. Stern vertical thruster 2 8, conformal antenna 9, main switch 10, stern stabilizer wing 11, stern ranging sonar 12, longitudinal thruster 13, DVL14, ranging sonar 2 15;
[0031] Acoustic Doppler profile velocimeter 2, bow vertical thruster 1 4, battery compartment 5, control cabin 7, stern vertical thruster 2 8, and stern ranging sonar 12 are connected in sequence; acoustic Doppler profile velocity measurement The instrument 2 is composed of a cylindrical cavity and a conical body. The bow ranging sonar 1 is installed on the side of the acoustic Doppler profile velocimeter 2; the bow vertical thruster 4 and the stern vertical thruster 2 8 are both It is a cylinder, the radius of the bottom circle is equal to the radius of the bottom circle of the aco...
Embodiment 2
[0053] as attached figure 1 As shown, the present invention is controlled by the bow ranging sonar 1, the acoustic Doppler profile velocimeter (ADCP) 2, the ranging sonar 3, the bow vertical thruster 4, the battery compartment 5, the retractable lifting point 6, the control Cabin 7, stern vertical thruster 8, conformal antenna 9, main switch 10, stern stabilizer wing 11, stern ranging sonar 12, longitudinal thruster 13, DVL14, ranging sonar 15. The range-finding sonars 1, 3, 12, and 15 adopt a modular design, the processing board and the transducer are integrated in a pressure-resistant shell, and standard six-core watertight connectors are used for power supply and data transmission; the underwater The robot can meet the installation of different detection equipment, and there are watertight plugs of uniform size, and the equipment can be quickly connected to the robot. Different tasks require the installation of the required detection equipment, which is modular and versati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More