

Method and device for determining attitude data of carrier
A technology of data and attitude, which is applied in the field of determination of attitude data, can solve problems such as inaccurate determination of attitude data, achieve the effects of avoiding discontinuity and gimbal deadlock, solving inaccurate determination, and improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
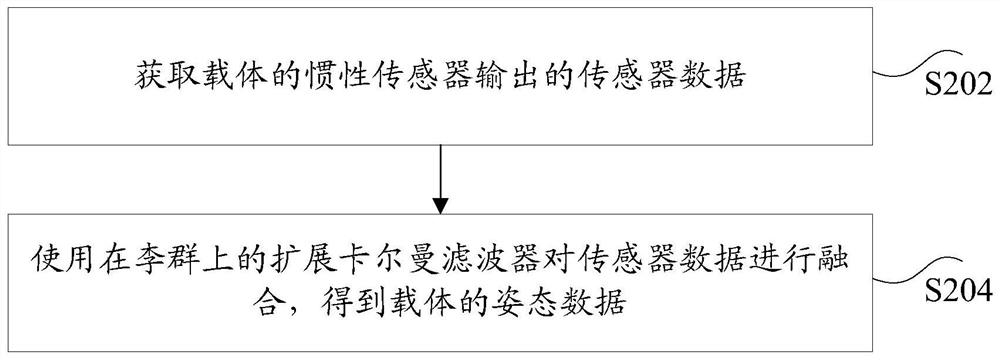
[0020] According to an embodiment of the present invention, an embodiment of a method for determining attitude data of a carrier is provided.
[0021] Optionally, in this embodiment, the method for determining the posture data of the carrier above can be applied to such as figure 1 In the hardware environment constituted by the server 102 and the terminal 104 as shown. figure 1 is a schematic diagram of a hardware environment of a method for determining attitude data of a carrier according to an embodiment of the present invention. Such as figure 1 As shown, the server 102 is connected to the terminal 104 through a network. The above-mentioned network includes but not limited to: a wide area network, a metropolitan area network or a local area network. The terminal 104 is not limited to a PC, a mobile phone, a tablet computer, and the like. The method for determining the posture data of the carrier in the embodiment of the present invention may be executed by the server 102 ...
Embodiment 2
[0146] The technical solutions of the present invention will be described below in conjunction with preferred embodiments.
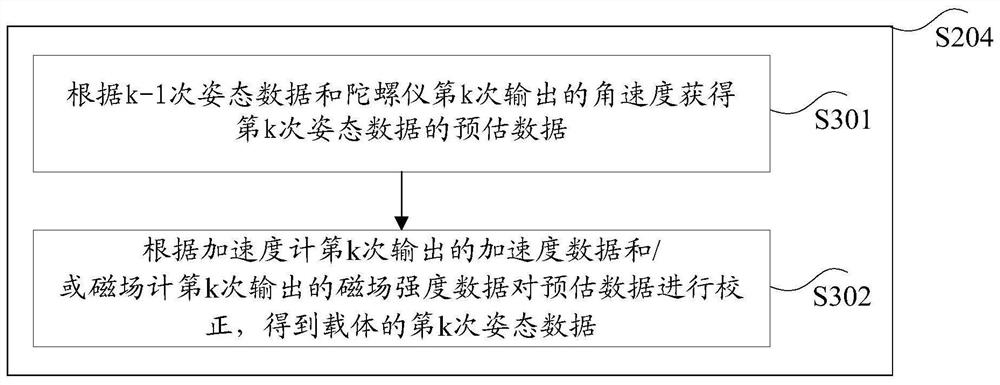
[0147] Figure 4 is a schematic diagram of attitude data measurement of a carrier according to an embodiment of the present invention. The carrier of this embodiment carries inertial sensors including gyroscopes, accelerometers and magnetometers. Optionally, the gyroscope is a three-axis gyroscope, which outputs angular velocity data ω k , the accelerometer is a three-axis accelerometer, the output acceleration a k , the magnetic field meter is a three-axis magnetic field meter, and the output magnetic field value b k .
[0148] In the embodiment of the present invention, the extended Kalman filter is used, and the rotation matrix X (X∈SO(3) from the sensor coordinate system to the world coordinate system, SO(3) is a Lie group G) is used as the state of the extended Kalman filter variable, and assume that the posterior probability distribution of the ...
Embodiment 3
[0185] The application environment of the embodiment of the present invention may refer to, but is not limited to, the application environment in the foregoing embodiments, which will not be described in detail in this embodiment. An embodiment of the present invention provides an optional specific application for implementing the method for determining the posture data of the carrier above.
[0186]The embodiment of the invention discloses a Lie group-based inertial sensor data fusion algorithm, aiming at estimating the attitude of the inertial sensor carrier more accurately. The inertial sensor includes a three-axis accelerometer, a three-axis gyroscope, and a three-axis magnetometer. The attitude of the sensor carrier is its roll (Roll), yaw (Yaw) and pitch (Pitch) at a certain moment, such as Figure 5 . in, Figure 5 is a schematic diagram of the posture of a carrier according to an embodiment of the present invention. The attitude can also be represented by the rotati...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More