

Multi-object optimized space manipulator trajectory planning method
A space manipulator, multi-objective optimization technology, applied in manipulators, program-controlled manipulators, instruments, etc., can solve problems such as failure of directional antennas and observation equipment, increase the time required to stabilize the manipulator, and affect the accuracy of the manipulator, etc., to achieve Solve the front-end shape sensitivity problem, reduce the reaction, and improve the effect of robustness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0056] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0057] The technical scheme adopted in the present invention comprises the following steps:
[0058] 1) The sine function of the polynomial is used to parameterize the joint angle trajectory of the space manipulator.
[0059] 2) According to the dynamic equation of the free-floating space robot, the functional relationship between the joint angular motion and the attitude disturbance of the base is established.
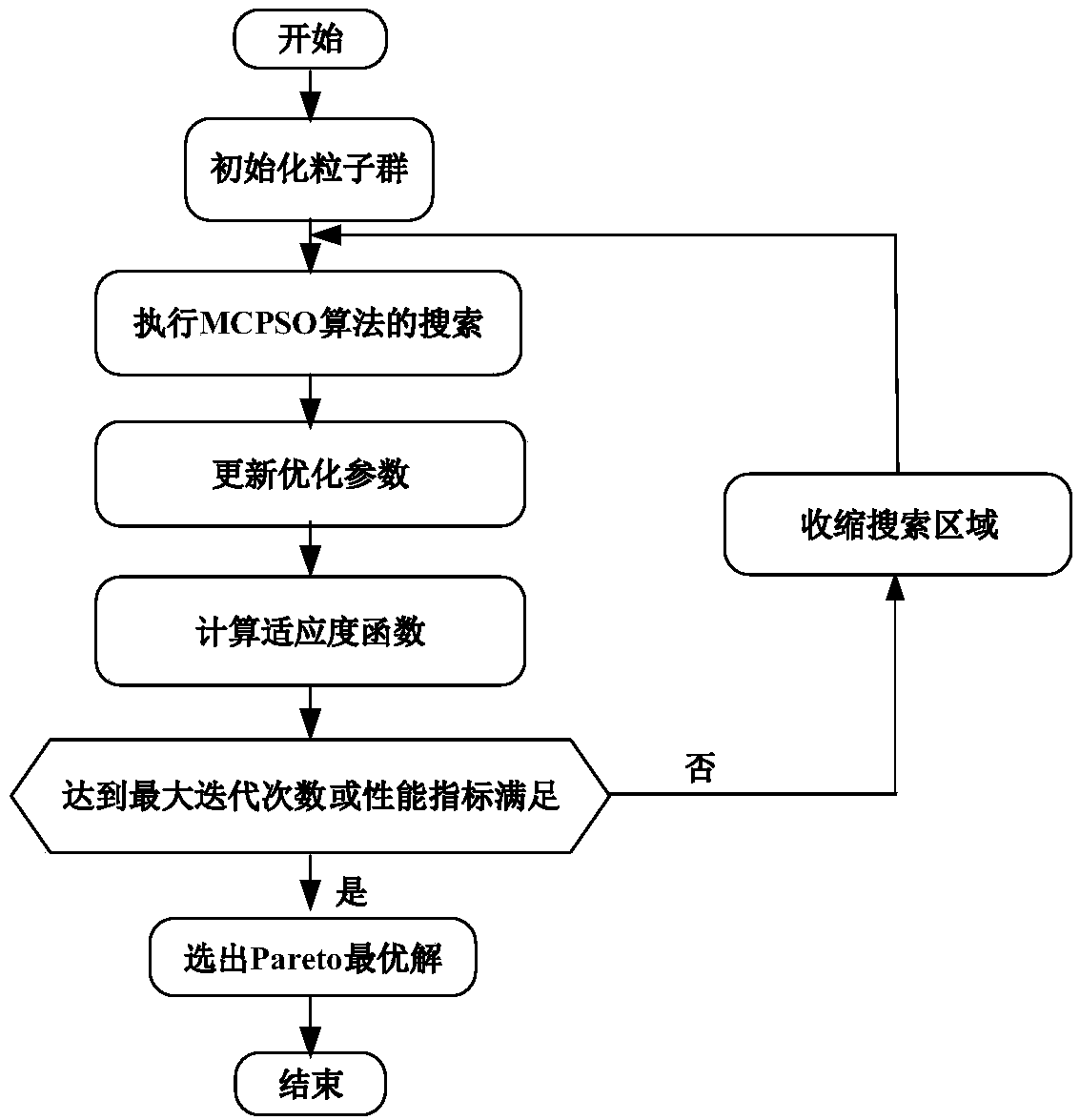
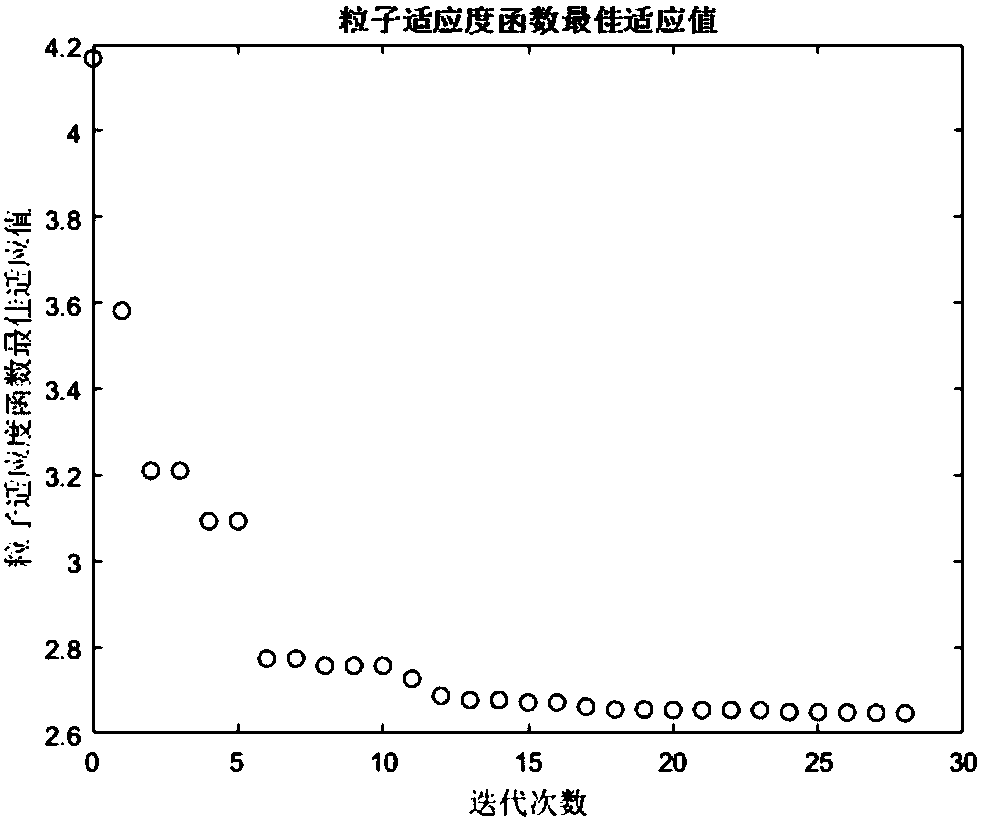
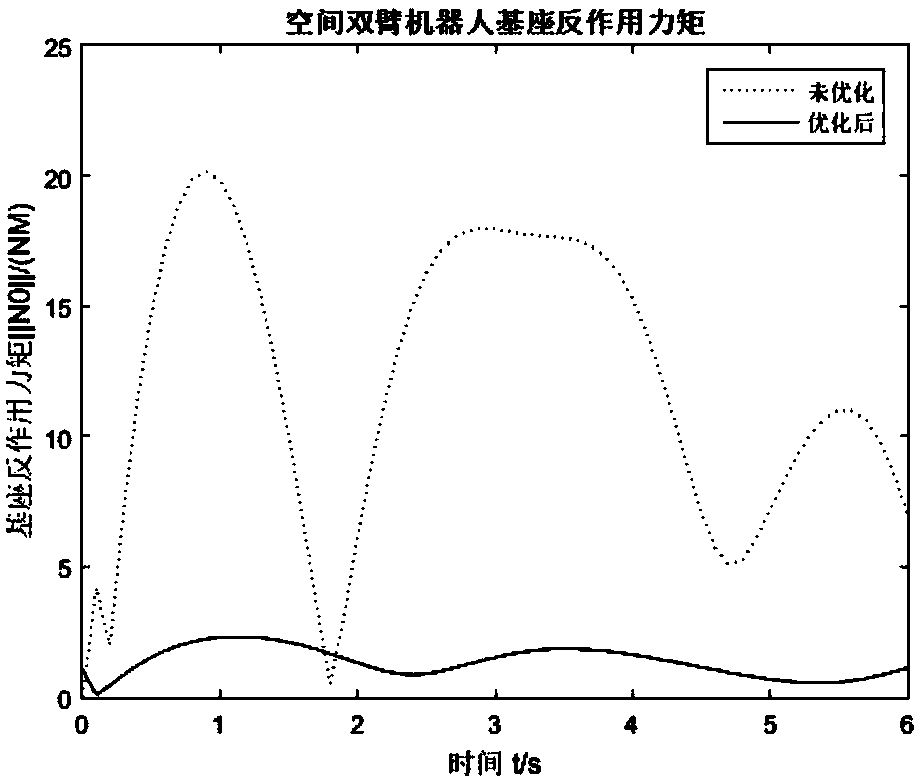
[0060] 3) The multi-objective chaotic particle swarm optimization algorithm is used to optimize the parameters of the joint trajectory, and at the same time achieve the minimum disturbance to the base and the minimum vibration of the mechanical arm.
[0061] In the step 1), the specific steps for parameterizing the joint angle trajectory of the space manipulator using a polynomial sine function are as follows:
[0062] When the end of the space manipul...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More