

Shape memory alloy-driving bionic wall climbing robot leg unit and robot
A wall-climbing robot and memory alloy technology, applied in the field of wall-climbing robots, can solve the problems of complex driving structure and gait design, and achieve the effects of simple gait planning, light weight and simple structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] Embodiments of the present invention will be described below with reference to the accompanying drawings. Those skilled in the art would recognize that the described embodiments can be modified in various ways or combinations thereof without departing from the spirit and scope of the invention. Accordingly, the drawings and description are illustrative in nature and not intended to limit the scope of the claims. Also, in this specification, the drawings are not drawn to scale, and like reference numerals denote like parts.
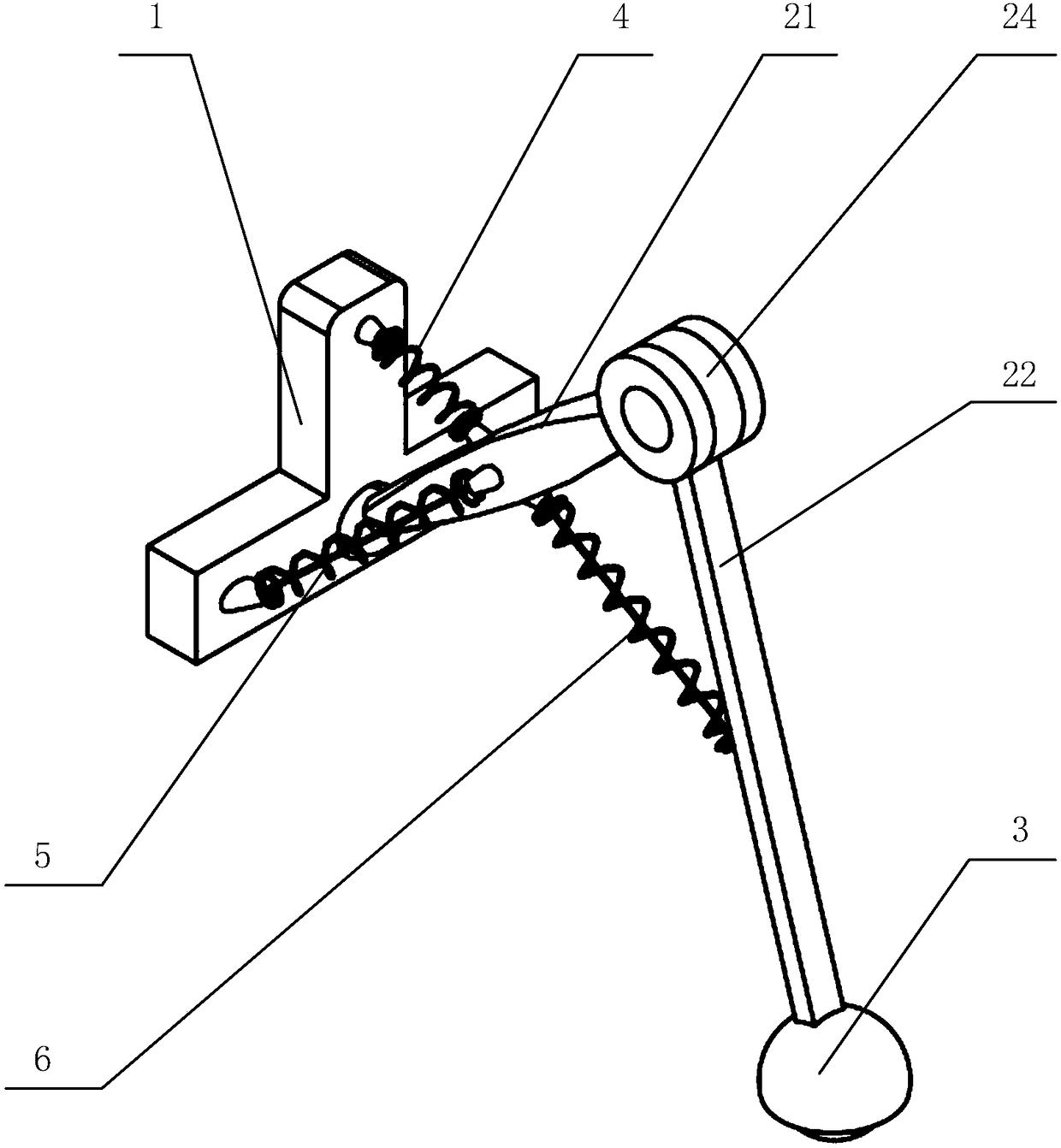
[0033] figure 1 It is the structural representation of the leg unit of the bionic wall-climbing robot described in the present invention, as figure 1As shown, the bionic wall-climbing robot leg unit of the present invention is installed on the torso 1 of the bionic wall-climbing robot, and its movement is driven by a shape memory alloy (ShapeMemory Alloy, referred to as SMA), and the bionic wall-climbing robot leg unit includes a bionic leg 2. Da...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More