

Force feedback man-machine interaction system and method based on electromagnetic theory and mobile tracking
A mobile tracking and electromagnetic theory technology, applied in human-computer interaction systems and their interaction fields, can solve problems such as blind spots, experimental effects, and inability to guarantee calculation accuracy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0100] The present invention will be described in further detail below in conjunction with the examples, but the embodiments of the present invention are not limited thereto. If there are any points not described in detail below, those skilled in the art can realize or understand with reference to the prior art.
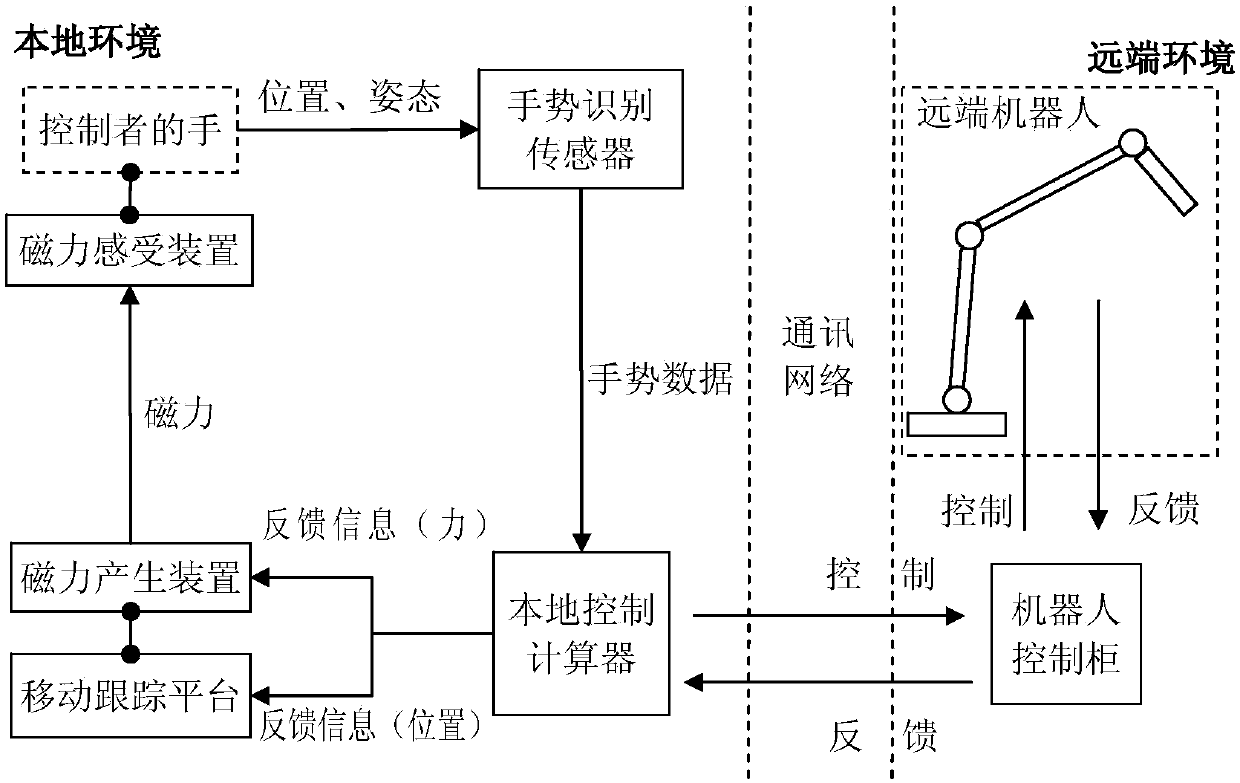
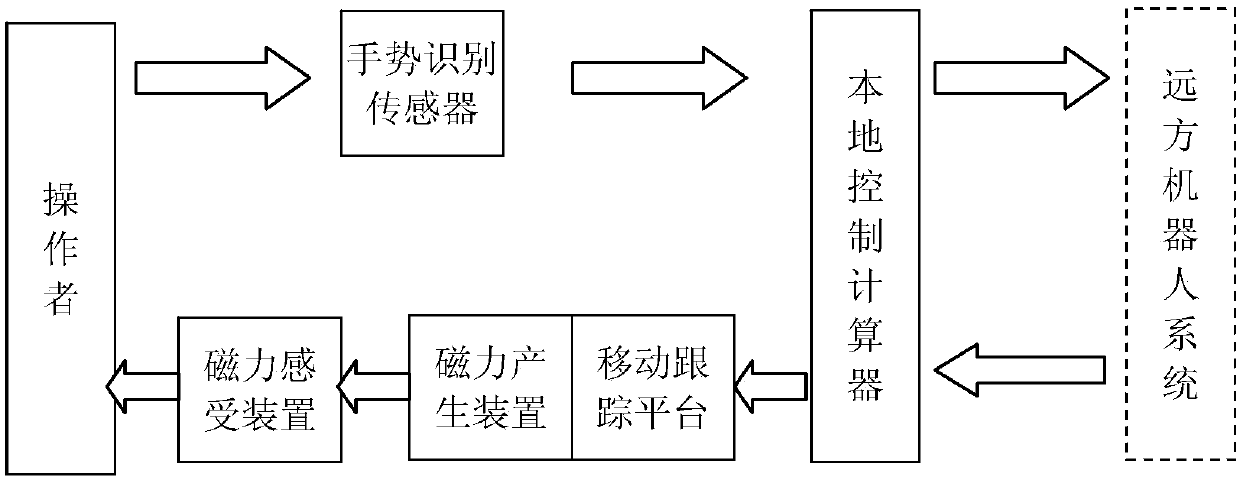
[0101] like figure 1 It is a schematic diagram of the composition and signal transmission of a force feedback human-computer interaction system based on electromagnetic theory and motion tracking. figure 2 It is a block diagram of a force feedback human-computer interaction system based on electromagnetic theory and motion tracking. A force feedback human-computer interaction system based on electromagnetic theory and motion tracking, which includes: a local control calculator, a motion tracking platform, a gesture recognition sensor, a magnetic force generating device, and a magnetic force sensing device; wherein, the gesture recognition sensor uses binocular visio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More