

A Robust Optimization Method for Underwater Vehicle Positioning Based on Switch Constraints
An underwater vehicle, robust optimization technology, applied in instrumentation, navigation, mapping and navigation, etc., can solve problems such as inability to achieve error closed-loop processing capability, map construction errors, etc., to eliminate adverse effects and reduce error rates. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0037] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0038] Firstly, the underwater environment is arranged. Lay out five marker points underwater and set any two of them as the same point.
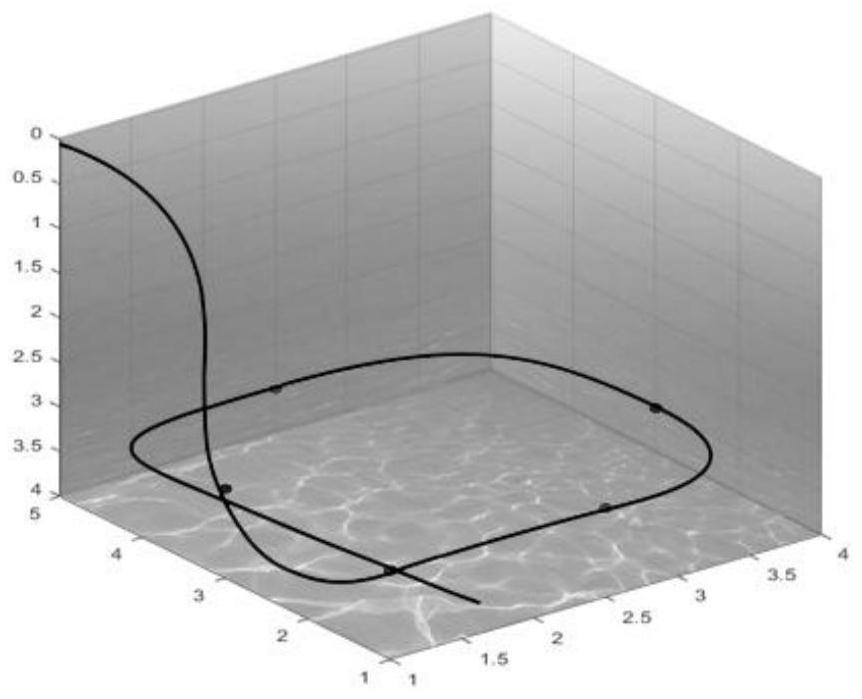
[0039] Determine the initial position of the underwater vehicle (x, z) = (0, 0); the speed of the vehicle v = 1m / s, the accuracy of the internal odometer is Gaussian white noise with a variance of 1, with the preset attached figure 2 path sailing.
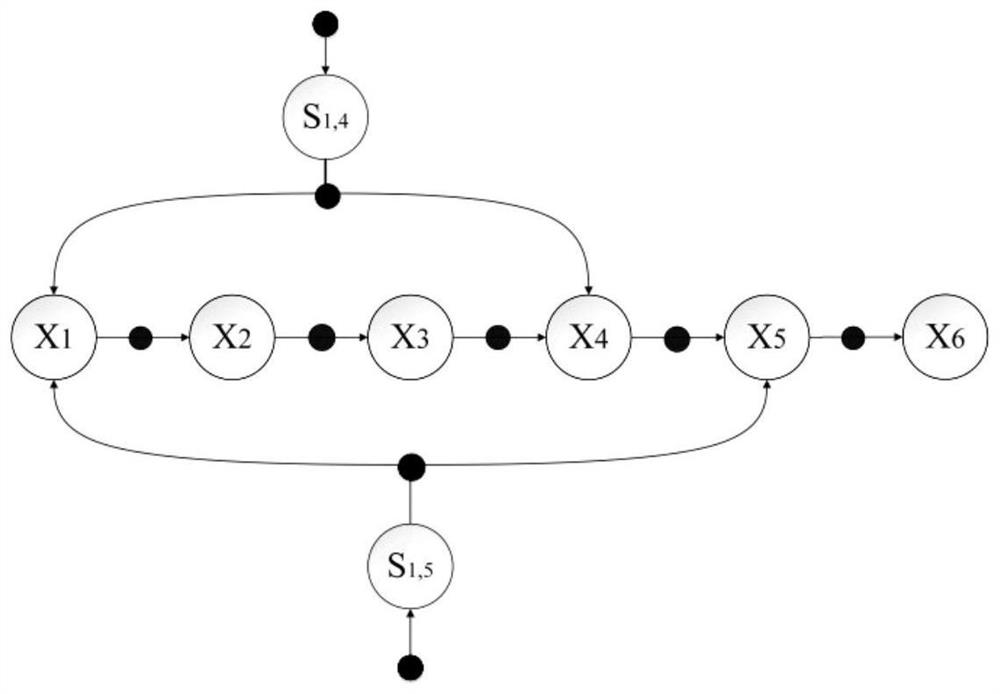
[0040] Step 1: Carry out map construction experiments underwater, and perform data fusion and build factor maps, as shown in the attached figure 1 As shown, and use the conditional probability distribution P(X|U) of the model to solve the SLAM pose graph problem. Where X represents the node pose and U represents the node constraint. Given a set of odometer ranging and closed-loop constraints u i , u ij ∈U, where u i Indicates any type of control input, with x i relevant, x...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More