

A remote monitoring and control system based on augmented reality
An augmented reality and remote monitoring technology, applied in manufacturing tools, instruments, design optimization/simulation, etc., can solve problems such as inability to meet remote path planning, and achieve the effect of improving control accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
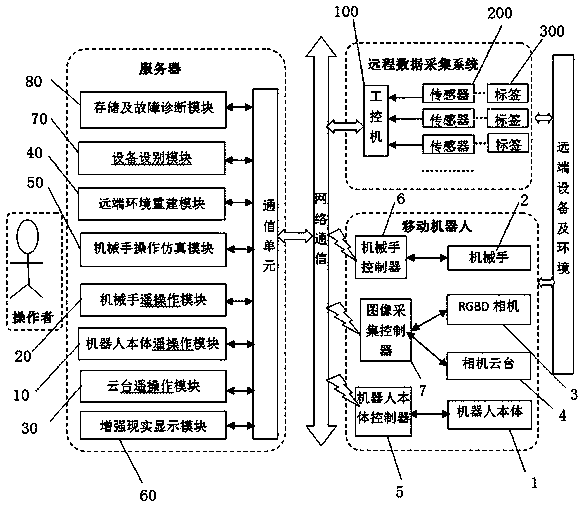
[0036] see figure 1 and figure 2 , a remote monitoring and control system based on augmented reality, including an interactive simulation control mode, which uses a server and a mobile robot located in the remote device and environment to complete the local path planning of the remote operation of the manipulator 2 in a virtual and real way and mocks, specifically:
[0037] The mobile robot comprises a robot body 1, and a manipulator 2 and an RGBD camera 3 arranged on the robot body 1;
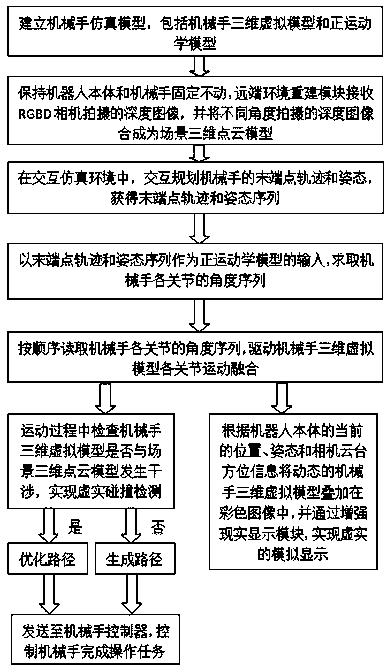
[0038]The server includes a remote environment reconstruction module 40, a manipulator operation simulation module 50, and an augmented reality display module 60; the remote environment reconstruction module 40 receives the depth images taken by the RGBD camera 3, and the depth images taken from different angles Image synthesis scene three-dimensional point cloud model, the manipulator operation simulation module 50 establishes the manipulator simulation model, then combines the scene three...
Embodiment 2
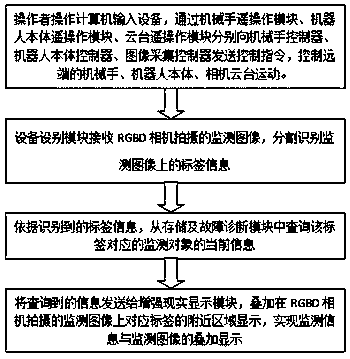
[0055] see figure 1 and image 3 The difference between this embodiment and Embodiment 1 is that Embodiment 2 can execute the monitoring mode while executing the interactive simulation control mode, and the interactive simulation control mode will not be described again.
[0056] The monitoring mode uses the remote data acquisition system located in the remote device and the environment, the server and the mobile robot, and completes the fusion display of monitoring data and monitoring images in a combination of virtual and real. The monitoring images can be pictures and / or or video. specifically:
[0057] The remote data acquisition system includes an industrial computer 100 and a sensor 200, each of the sensors 200 is connected to the industrial computer 100, each monitoring object is provided with the sensor 200, and each sensor 200 is correspondingly provided with a tag 300; The label 300 includes labels 300 in asymmetric forms such as two-dimensional codes and barcodes...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More