

Unmanned aerial vehicle-based real-time three-dimensional reconstruction method
A real-time 3D and unmanned aerial vehicle technology, applied in 3D modeling, image data processing, instruments, etc., can solve the problems of difficult matching of feature points, lack of real-time performance, slow matching speed, etc., achieve low cost and meet real-time 3D Reconstruction, surface smoothing effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0071] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but not to limit the scope of the present invention.
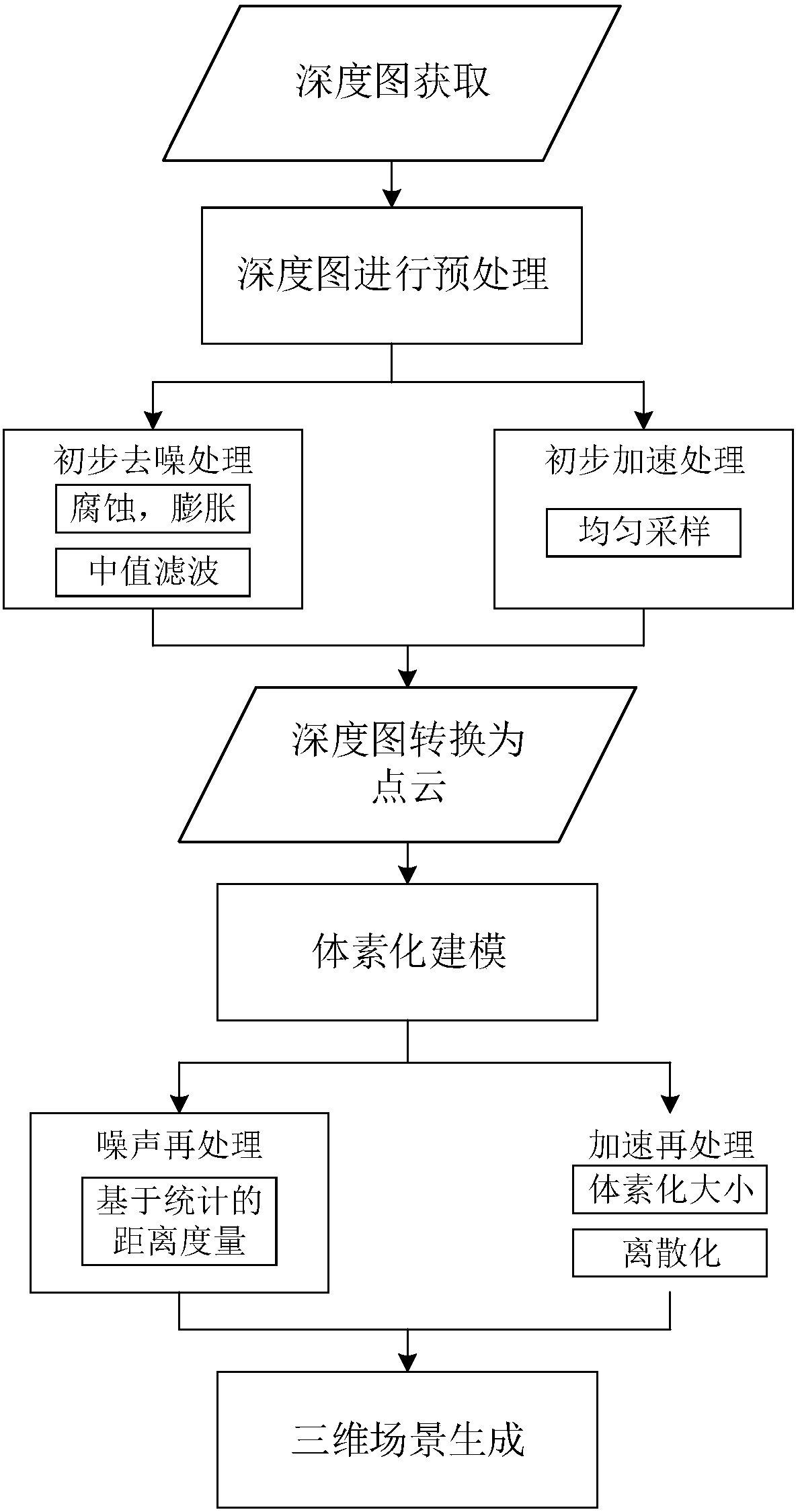
[0072] refer to Figure 1 to Figure 7 , a kind of real-time three-dimensional reconstruction method based on unmanned aerial vehicle of the present invention, comprises the following steps:
[0073] Step 1, obtain the depth data of the depth sensor and obtain the depth map;
[0074] The scene is captured by the binocular camera carried on the drone, and the depth data is obtained through the depth sensor according to the captured picture, and then the depth map of the scene is obtained; the captured image is a grayscale image with a size of 240*320; the depth data uses a xml file, as well as the UAV GPS data and yaw angle data obtained by the Guidence system. figure 2 and image 3...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More