

Upper limb external skeleton robot based on wheelchair
A technology for exoskeleton robots and wheelchairs, which is applied in vehicle rescue, passive exercise equipment, patient chairs or special transportation tools, etc. and functional improvement to achieve the effect of reducing volume, weight and volume
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
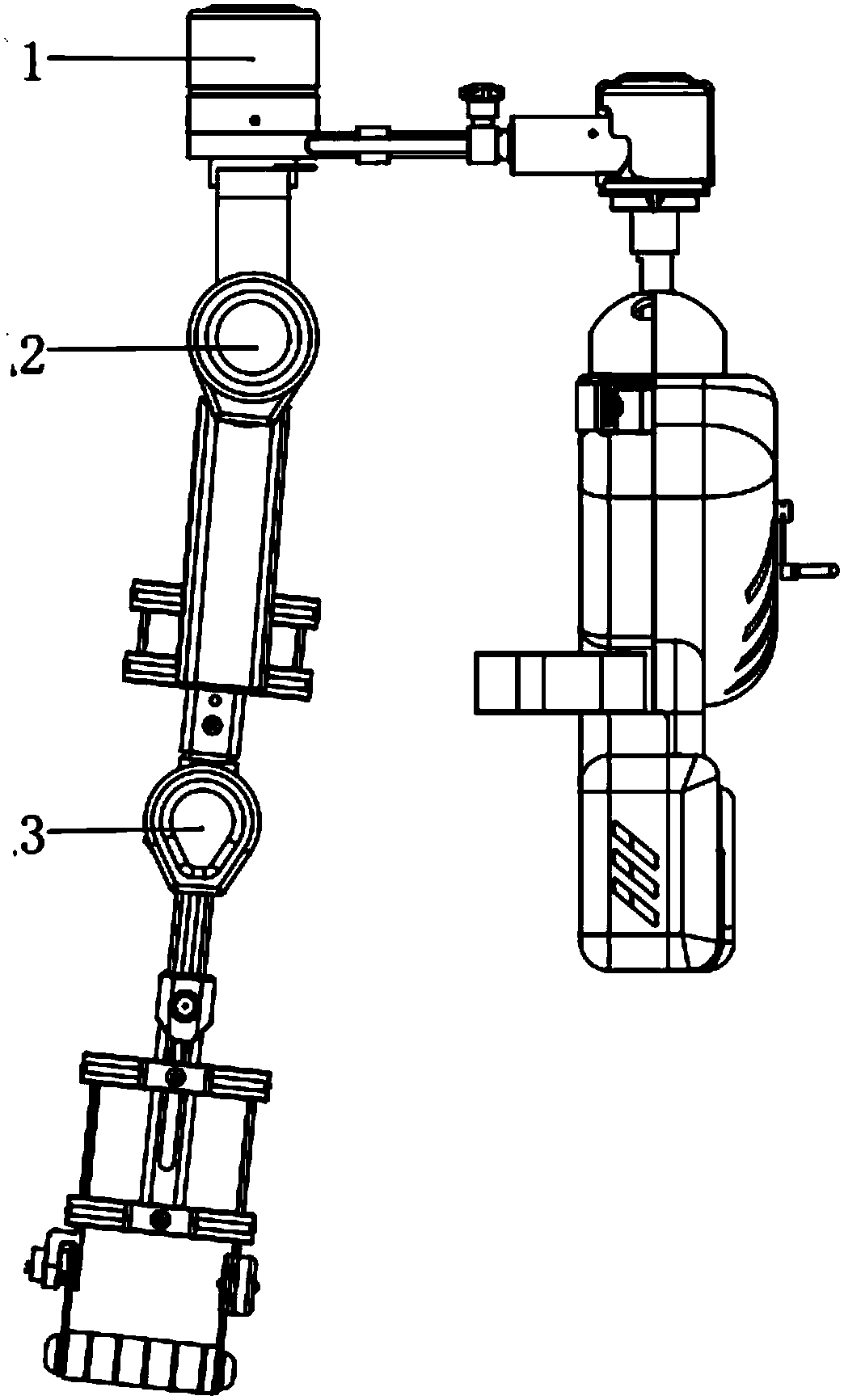
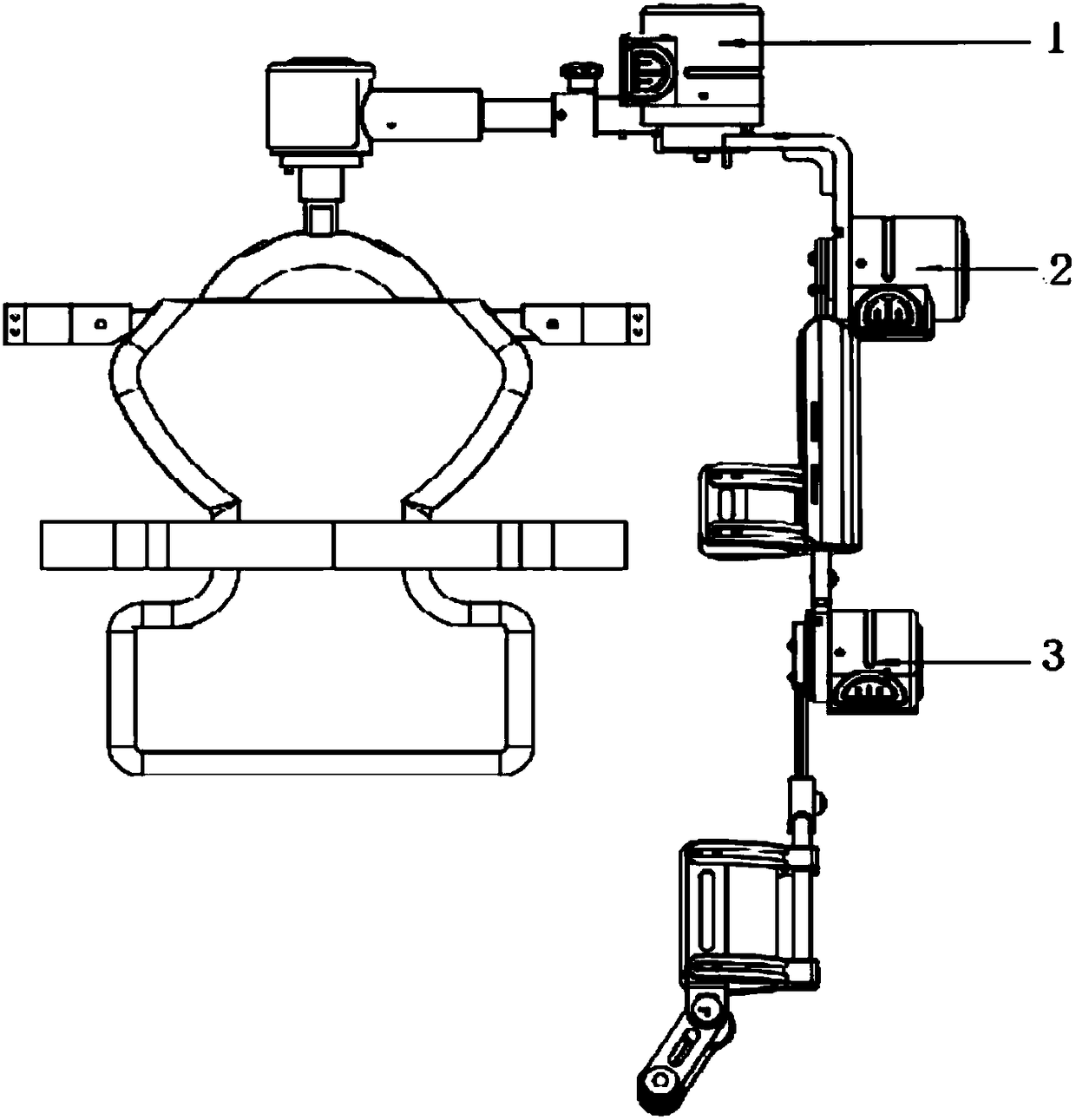
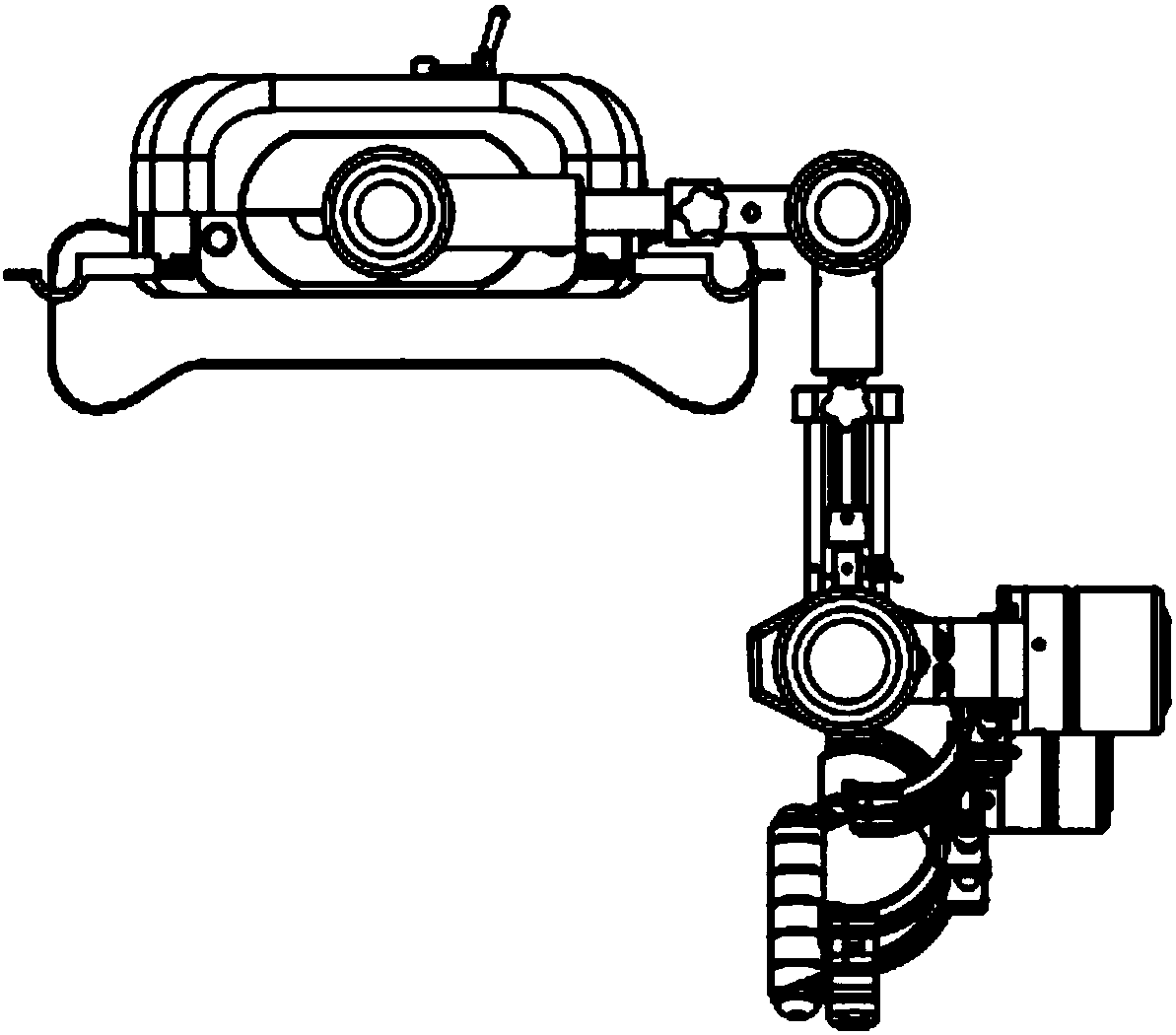
[0030] Such as Figure 1 to Figure 3 As shown, the wheelchair-based upper extremity exoskeleton robot of the present invention includes a movable intelligent wheelchair, an upper extremity exoskeleton rehabilitation robot, and a control system.
[0031] The main structure of the present invention is a movable intelligent wheelchair. The mobile intelligent wheelchair consists of the wheelchair itself, battery, external power supply interface, back support and lifting platform, control module box and upper limb exoskeleton rehabilitation robot. The storage battery can supply power to the wheelchair and the upper limb rehabilitation robot, and the direct connection to the 220V power supply can also supply power to the wheelchair and the rehabilitation robot.
[0032] The upper extremity exoskeleton rehabilitation robot is fixed on the back of the wheelch...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More