

Direct position determination method for correcting cubature Kalman filter
A technology of Kalman filtering and positioning method, which is applied in the field of direct positioning of modified volumetric Kalman filtering, which can solve the problems of estimation efficiency to be improved and the calculation amount dependence of genetic algorithm, and achieve the effect of eliminating noise, high parameter estimation efficiency and positioning efficiency.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
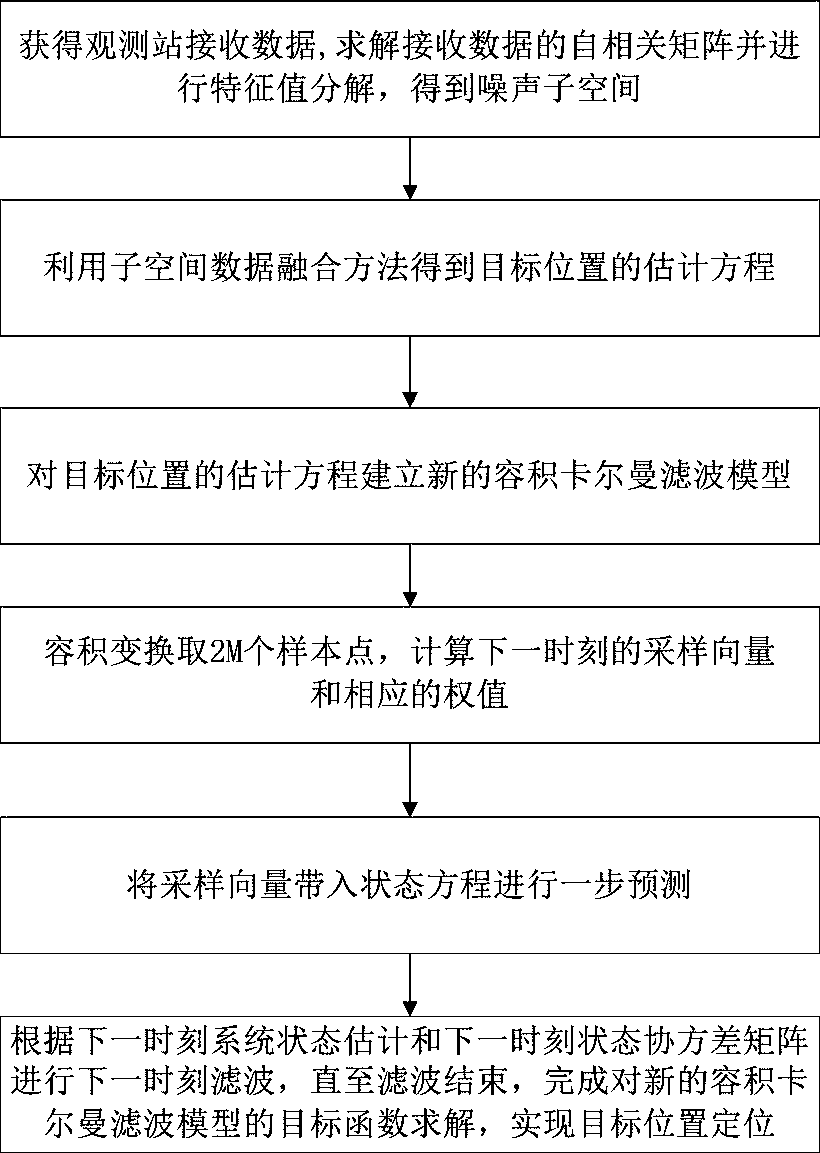
[0047] Such as figure 1 As shown, the modified volume Kalman filter direct positioning method of the present invention includes the following steps:
[0048] Assuming that the target is at rest, the coordinates are o=(o x ,o y ), the L observing stations are all composed of N-element linear arrays, the distance between the array elements is half a wavelength, and the observing stations have completed time synchronization, the coordinate of the first element of the lth observing station is u l =(u l,x ,u l,y ),l=1,2,...,L. Suppose the target sends a signal as
[0049] x(t)=s(t)e j2πft (1)
[0050] Where f is the carrier frequency and s(t) is the signal envelope. Then the received signal r of the lth observation station l (t) is
[0051] r l (t)=a l (o)x(t)+ν l (t),l=1,2,...,L (2)
[0052] Where ν l (t) is Gaussian white noise, a l (o) is the array flow pattern vector about the target position, which can be expressed as
[0053]
[0054] Where θ l (o) is the arrival angle of the targ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More