

Unmanned aerial vehicle formation performance system based on UWB location and implementation method thereof
An implementation method and a technology of drone formation, applied in the field of UWB positioning-based drone formation performance system, can solve the problems of high cost, limited number of drones, large size and inability to carry micro drones, etc., and achieve the goal of reducing prices Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The following specific implementation methods will further illustrate the present invention.
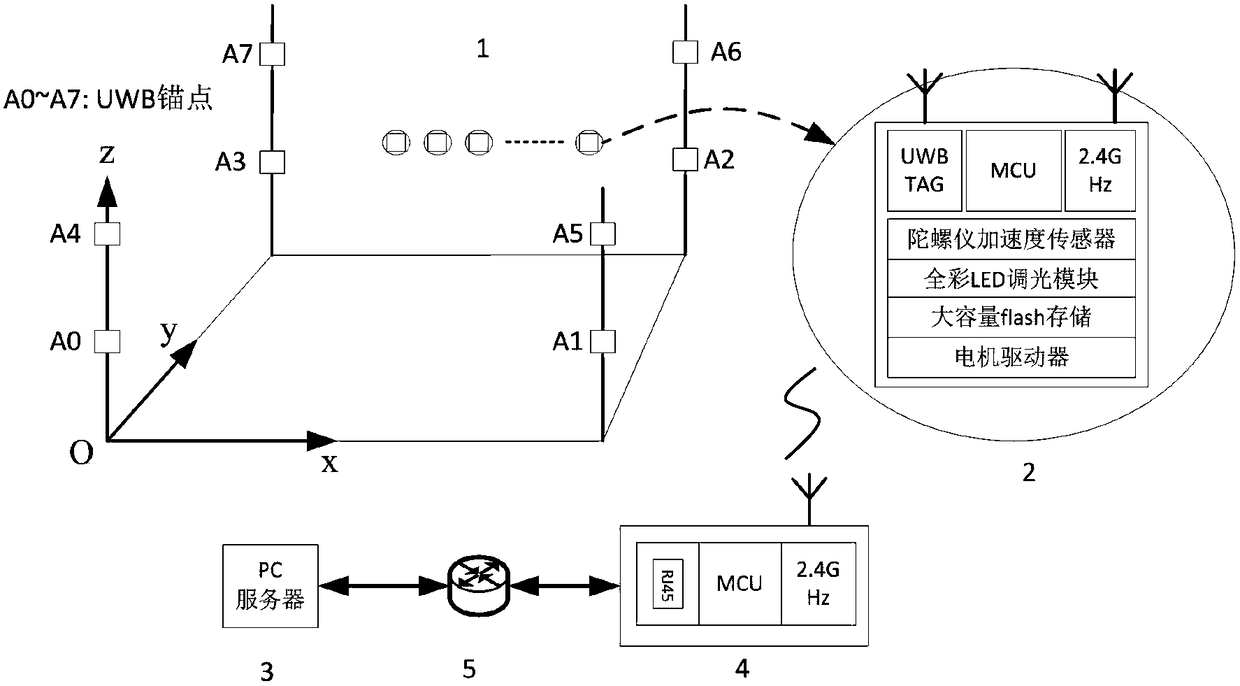
[0041] Such as figure 1 As shown, the UWB positioning-based UAV formation performance system embodiment is provided with a UWB three-dimensional positioning subsystem 1, a micro air vehicle subsystem 2, a formation navigation subsystem 3, a coordinator 4 and a router 5;
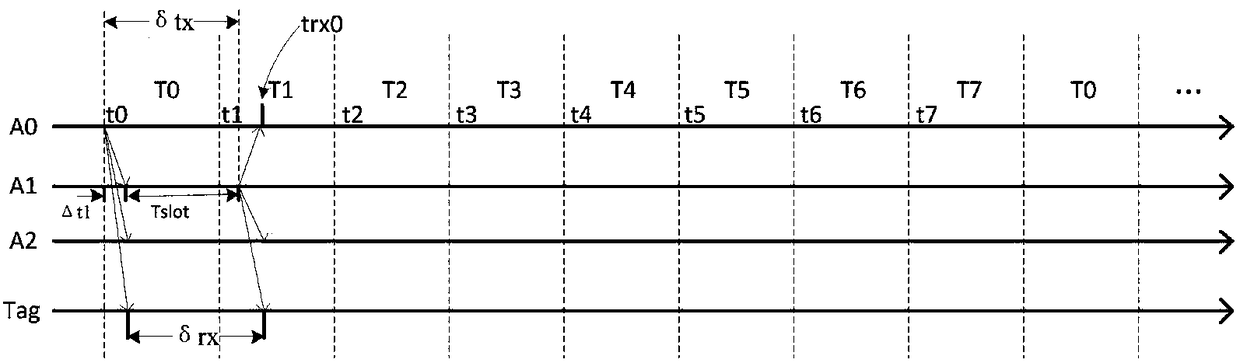
[0042] The UWB three-dimensional positioning subsystem 1 is composed of 8 positioning anchor points A1-A7 based on the ultra-wideband wireless transceiver module. T7 cyclically sends positioning signals;
[0043] The MAV subsystem is composed of Cortex M4MCU, gyroscope acceleration sensor, motor driver, UWBTag, 2.4GHz communication module, full-color LED dimming module and large-capacity flash memory;
[0044] The formation navigation subsystem 3 simulates the flight pattern of the micro-aircraft cluster by computer, and adopts the distributed storage technology of the flight pattern;
[0045] Described co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More