

Simulation flight implementation method based on virtual reality
An implementation method and virtual reality technology, applied in the field of flight simulation, can solve the problems of strong dizziness and short imaging distance, and achieve the effect of reducing dizziness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
[0027] As an implementation, step 4 includes:
[0028] Coordinate transformation sub-step: use the following formula to perform coordinate transformation on the angular displacement output by the high-pass angular velocity filter in the attitude angle:
[0029]
[0030] Among them, θ wh , and ψ wh is the attitude angle output by the high-pass angular velocity filter; θ aL and The attitude angle output for the low-pass acceleration filter.
[0031] As an implementation, step 4 includes:
[0032] Frequency limiting sub-step: use the following formula to limit the motion frequency in the flight parameters:
[0033]
[0034] Among them, k is the preset amplification factor, w x is the extreme value of flight simulation motion frequency, ε x is the damping ratio.
[0035] As an implementation, step 4 includes:
[0036] Low-frequency acceleration sub-step: use the following formula to obtain the high-pass acceleration channel:
[0037]
[0038] Among them, a b...
example 1
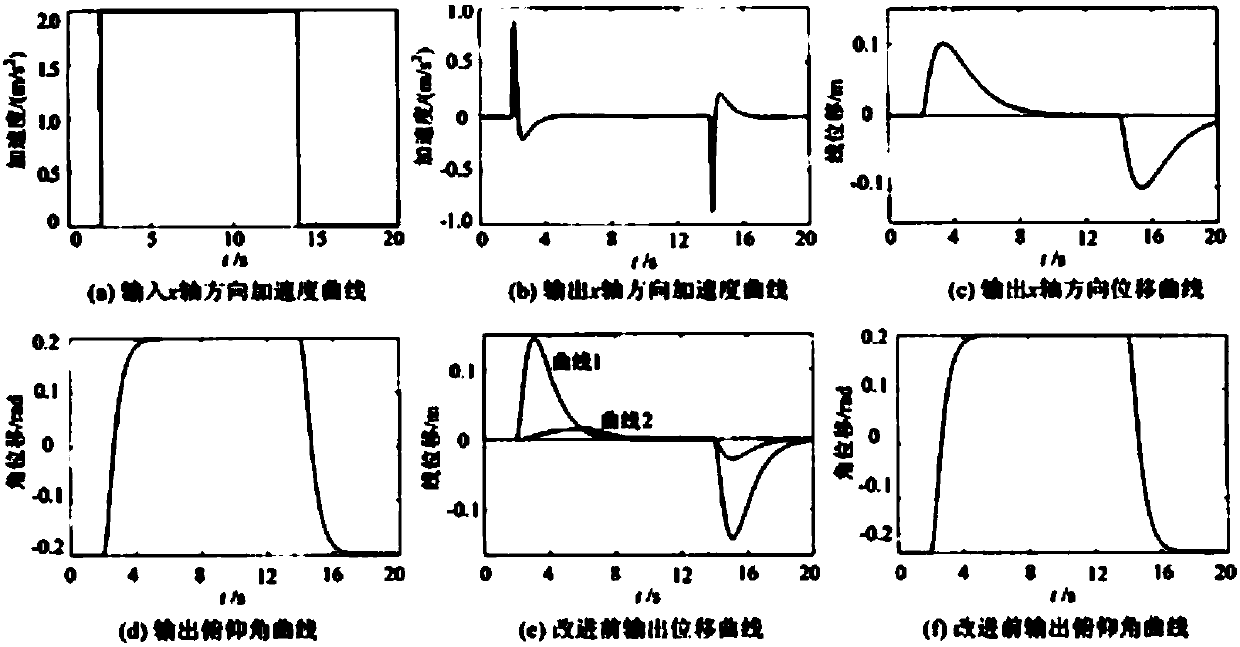
[0111] Example 1: Select a square wave signal as the input signal. Assuming that only an acceleration square wave signal is input in the z direction, after the washout algorithm, the acceleration, velocity, displacement and other curves of the moving platform are output. By analyzing these curves, we can clearly understand the process and advantages of the improved washout algorithm. figure 1 is the acceleration, displacement and elevation curves of the input and output.
[0112] exist figure 1 At 2s and 14s in (a), the acceleration signal changes suddenly, which is equivalent to a high-frequency acceleration signal. The signal passes through the high-pass acceleration channel, and the acceleration and displacement curve in the z-axis direction is output, such as figure 1 (b) and figure 1 (c) shown. figure 1 (d) simulated is figure 1 The low-frequency acceleration signal in (a) is converted into angular displacement through tilt coordination, and the slope is always kept a...
example 2
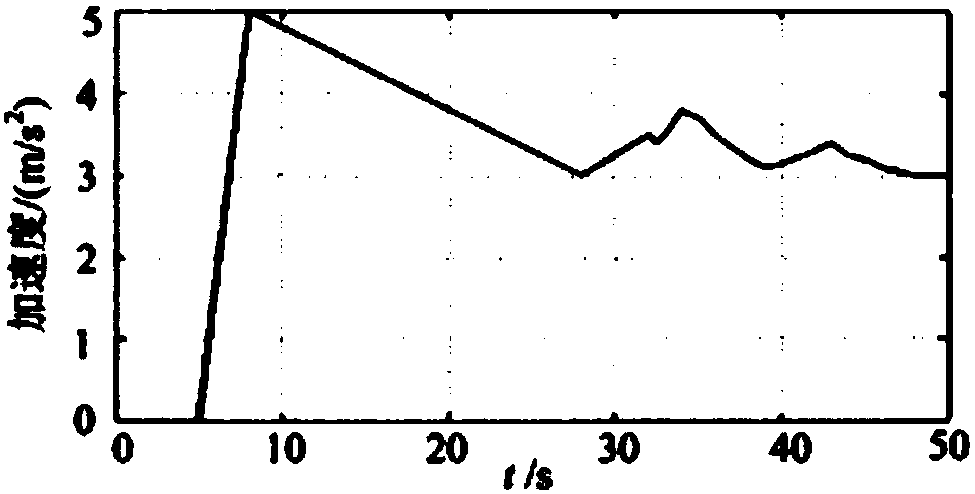
[0114] Example 2: Taking a set of real flight action curves as the analysis object, input a set of actual acceleration signals during the takeoff phase of the aircraft, such as figure 2 shown.
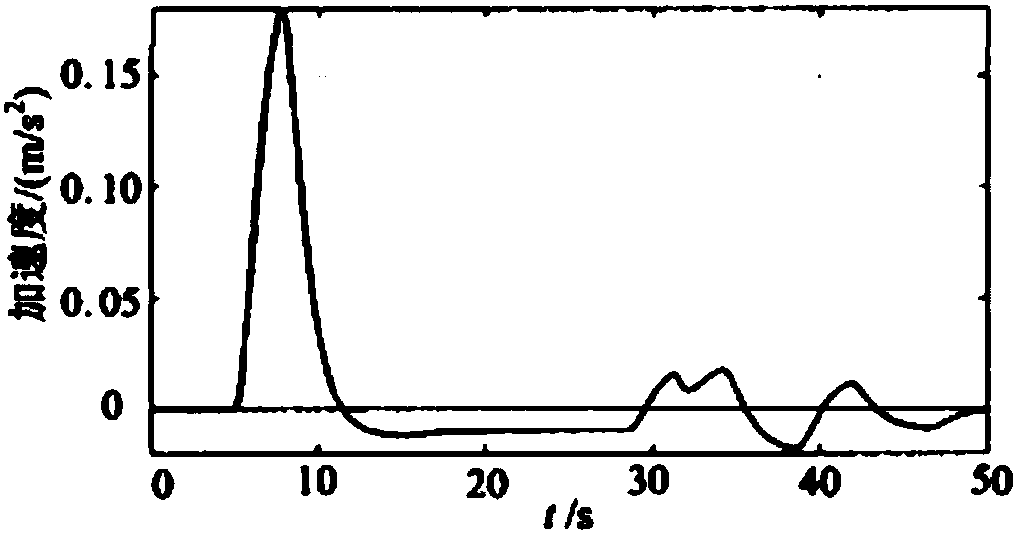
[0115] The flight simulation platform returns to the initial position in time after each sudden change in motion, and continues to accelerate at low frequencies. By converting the tilt coordination into angular displacement, the working space of the flight simulation platform is rationally utilized, and the feasibility of the improved washout algorithm is proved. Such as image 3 , Figure 4 shown.
[0116] Monitor data changes in real time through the display, record data through the flight simulation interface, and check whether the motion result exceeds the travel limit and meets the simulation requirements through the obtained data. It can be seen from Table 1.1, Table 1.2, and Table 1.3 that the obtained data meets the requirements of the flight simulation platform. Simulatio...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More