

Full-automatic feeding and discharging intelligent manipulator for paper model
An intelligent manipulator, fully automatic technology, applied in manipulators, program-controlled manipulators, conveyors, etc., can solve the problems of poor overall structural stability, long cantilever pulling and pulling, etc., to reduce load bearing, enhance structural stability, and achieve high transmission accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The present application will be further described below in conjunction with the accompanying drawings and specific embodiments.
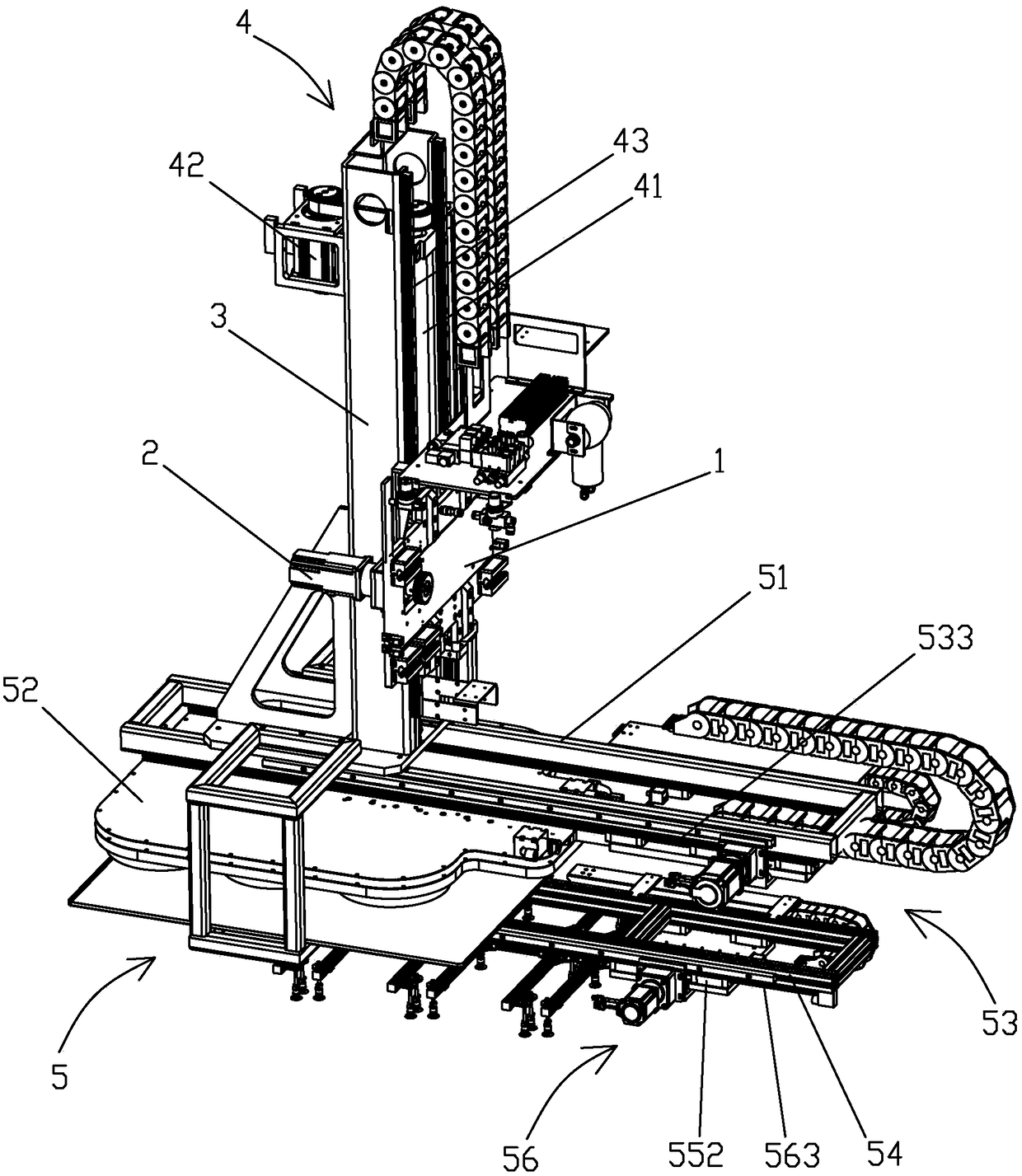
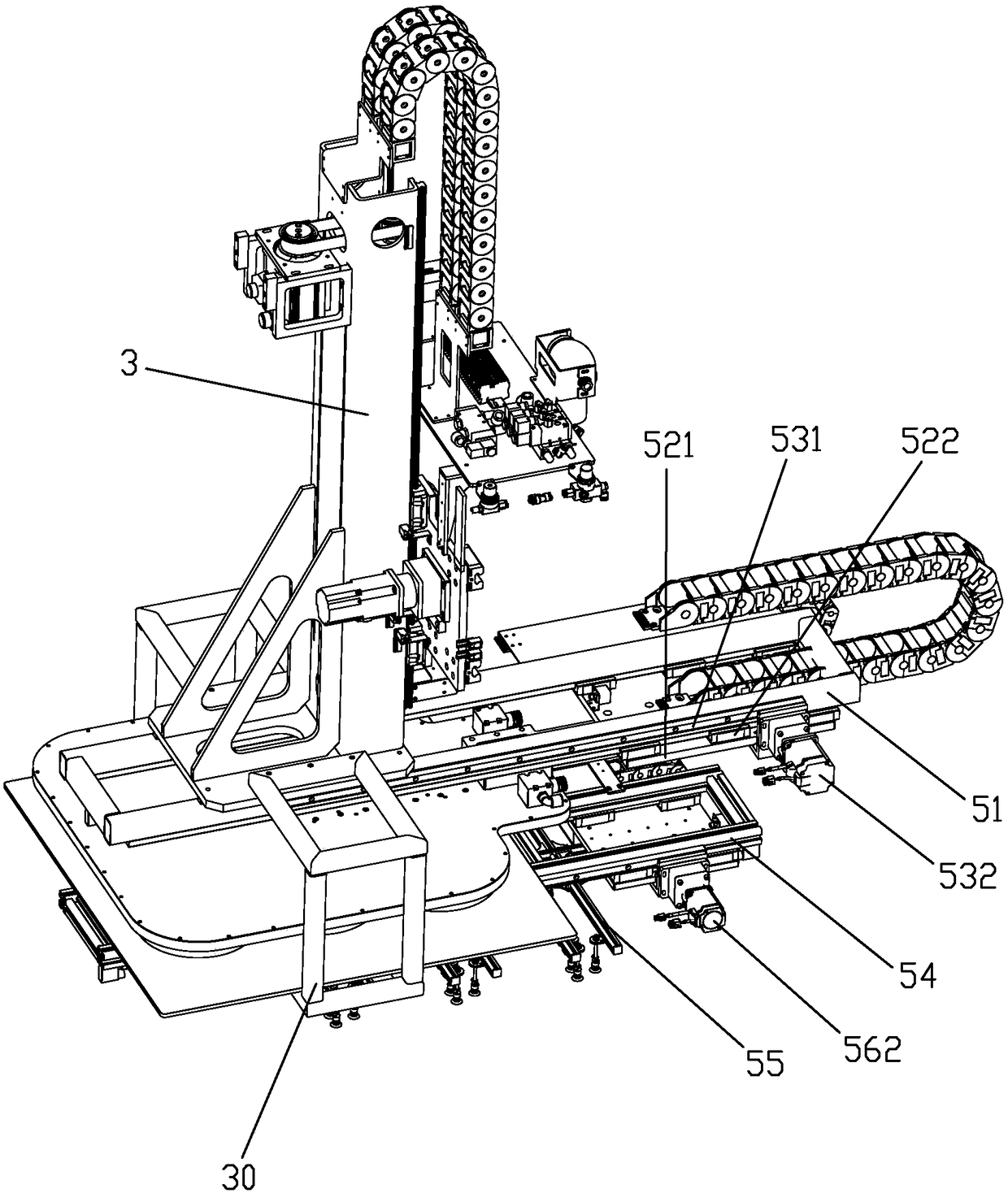
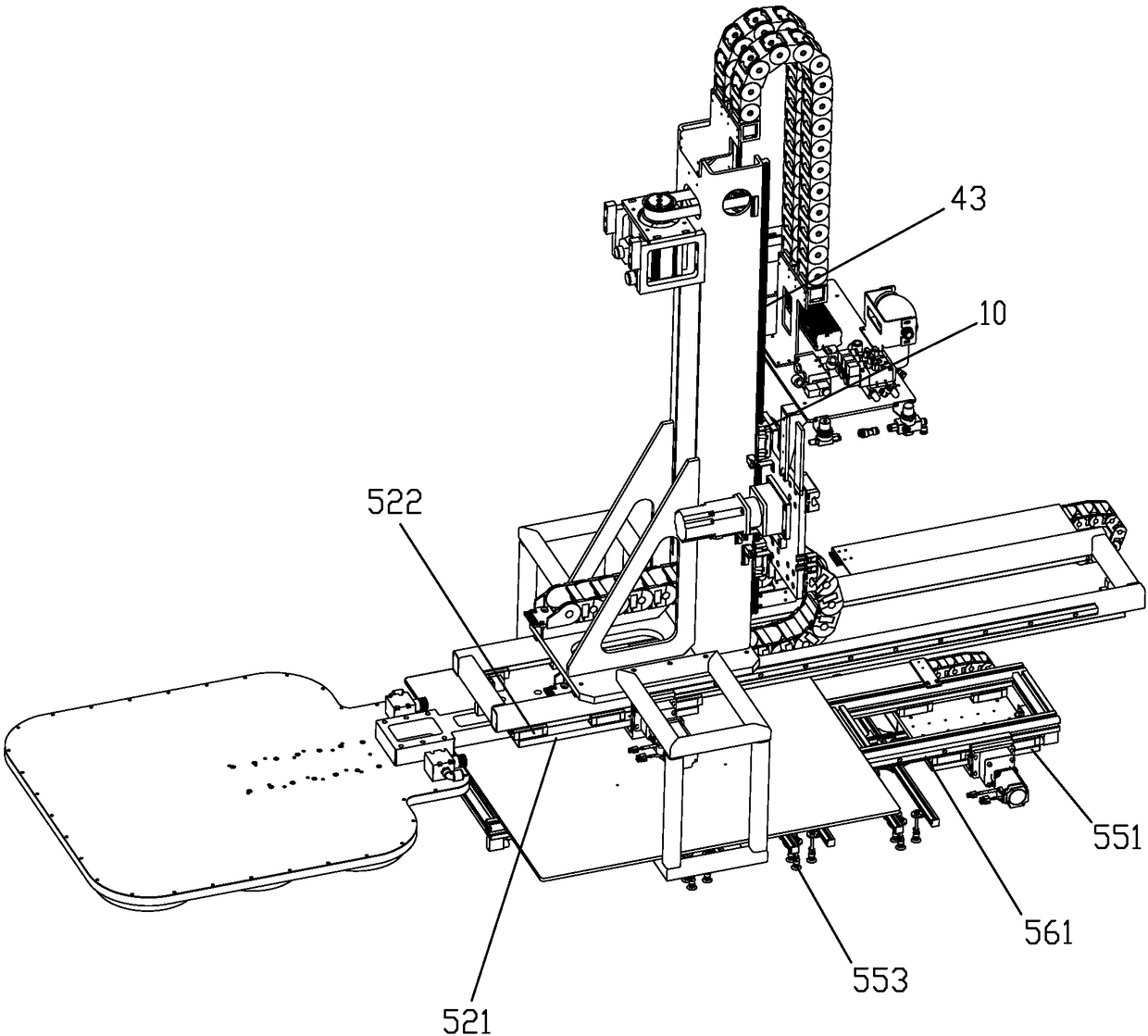
[0041] Please see attached figure 1 To attach Figure 5 , an intelligent manipulator for fully automatic loading and unloading of paper molds, including a horizontal sliding support 1, a horizontal driving structure 2, a lifting bracket 3, a vertical driving mechanism 4 and a paper mold adsorption assembly 5. in:
[0042] The transverse sliding support 1 is slidably connected to the support frame of the paper mold forming equipment, and the transverse driving mechanism 2 is arranged on the transverse sliding support 1 for driving the transverse sliding support 1 to reciprocate and slide laterally along the support frame. Specifically, the lateral drive mechanism 2 includes a lateral drive motor 21 arranged on the lateral sliding support 1, and the output shaft of the lateral drive motor 21 is provided with a lateral gear meshed with a later...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More