

Time synchronization and real-time data acquisition method for multi-sensor combined navigation system
An integrated navigation system and multi-sensor technology, which is applied in the field of time synchronization and data acquisition of real-time multi-sensor integrated navigation, can solve problems such as difficulty in implementation and poor generality, and achieve the effects of wide application, easy portability, and simple implementation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The specific technical solutions of the present invention will be described in detail below in conjunction with the drawings and embodiments.
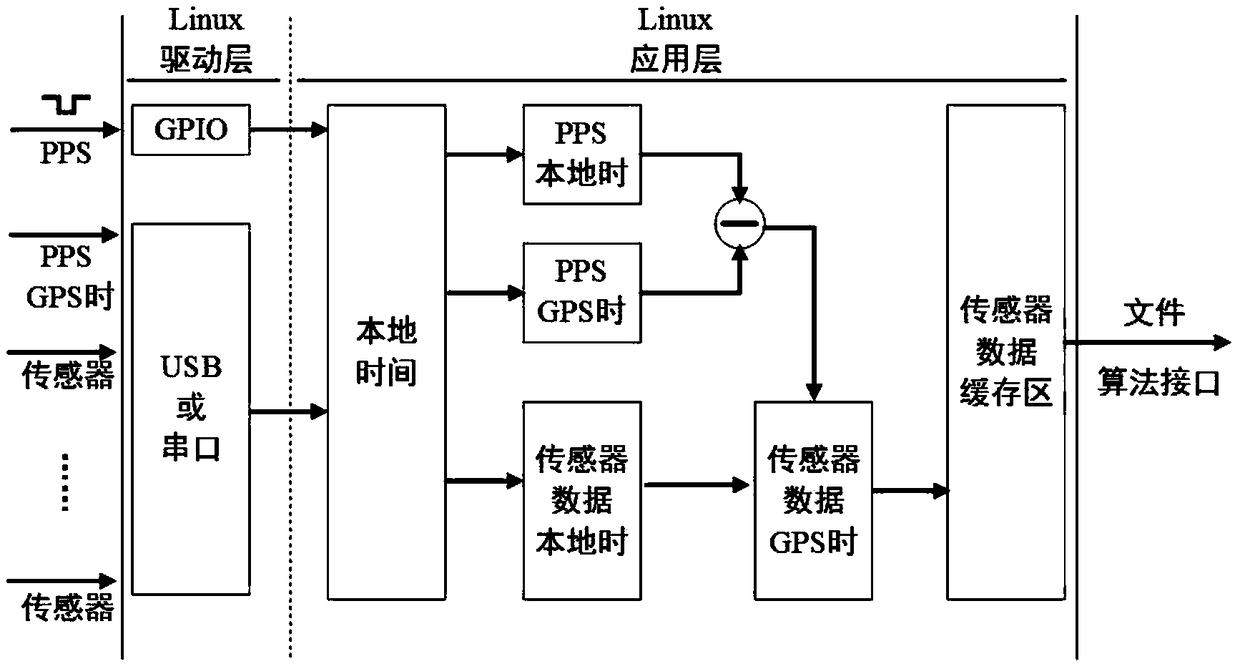
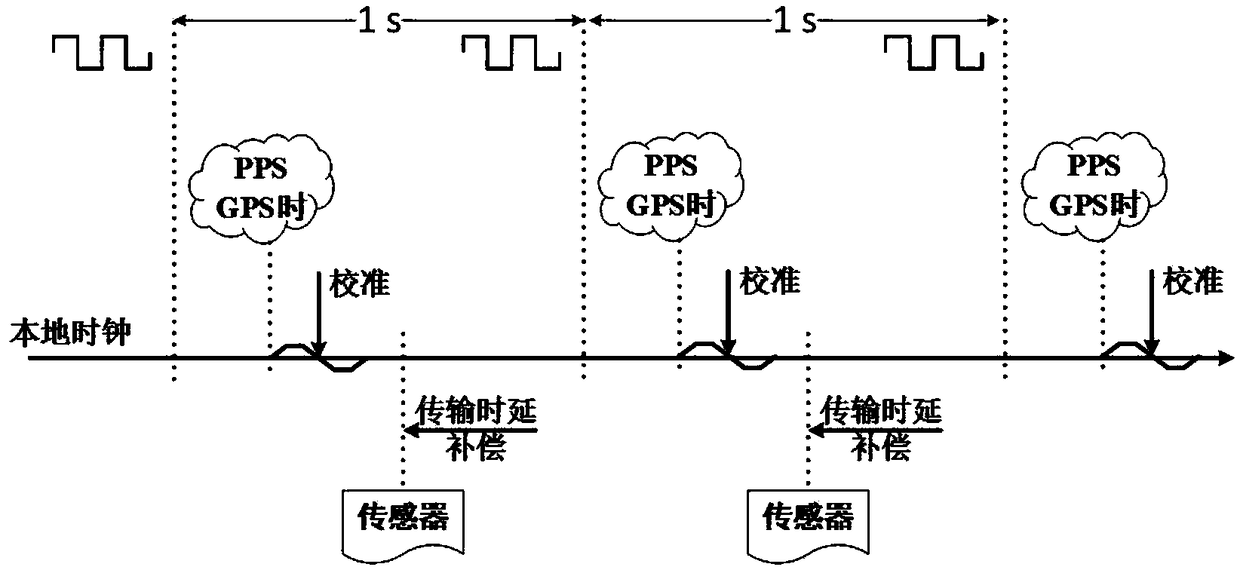
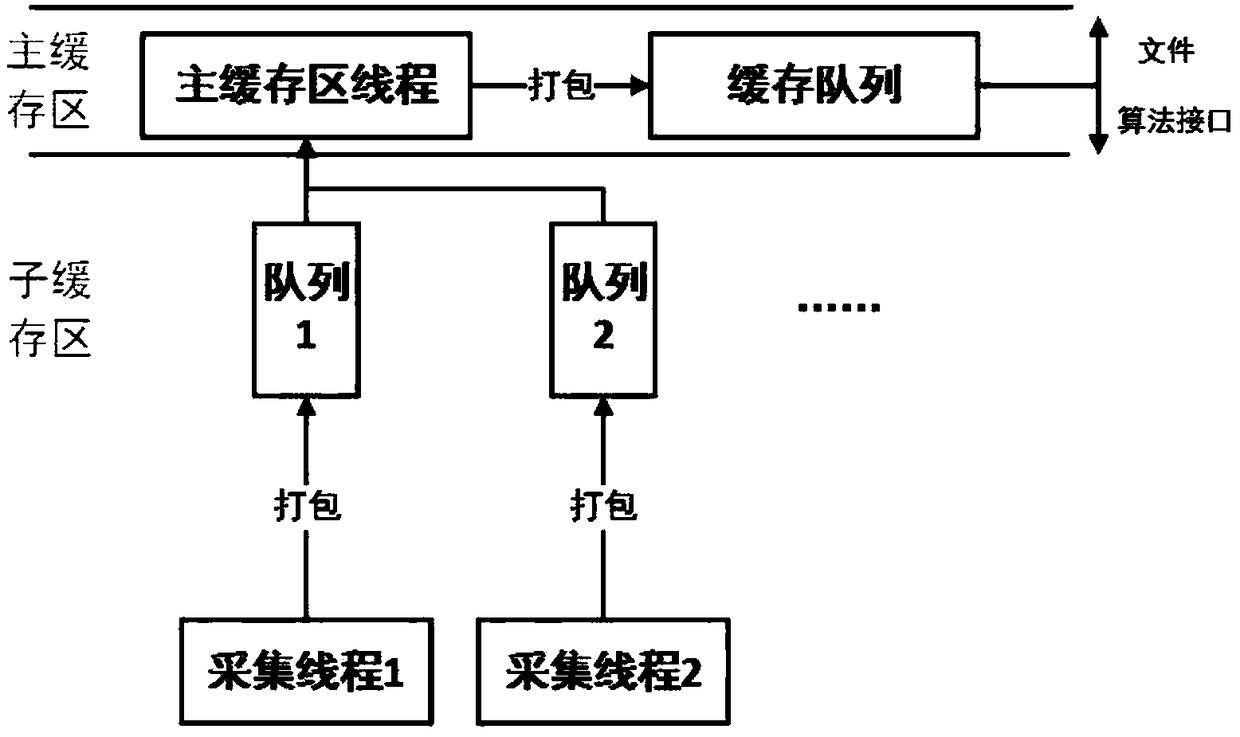
[0021] The present invention proposes that the real-time transformation of the standard Linux system is to make the operating system running on the computing carrier (such as an ARM development board) meet the hard real-time requirements; Keep consistent with the standard GPS time, and then enter the designed buffer zone to prepare for the integrated navigation data fusion, specifically: take the PPS signal output by the GPS receiver as a reference, correct the local clock of the computing carrier, and then use the local clock of the computing carrier to The clock time stamps the other sensors.
[0022] The embodiment of the present invention realizes as follows:
[0023] Firstly, the standard Linux kernel is rewritten using the PREEMPT-RT patch to make the kernel fully preemptible and meet the requirements of a hard real-time ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More