

A method for positioning and navigation of UAV based on binocular vision
A positioning navigation and binocular vision technology, applied in image data processing, instruments, etc., can solve the problems of lack of height information, etc., and achieve the effects of strong anti-interference ability, good real-time performance, and strong stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0055] The present invention provides a binocular vision-based method for positioning and navigating UAVs. The initial tracking target frame is input and optimized through user interaction, and a tracking model based on correlation filtering and target loss based on a random forest classifier are established. Retrieve the module to realize a long-term stable UAV target tracking method.
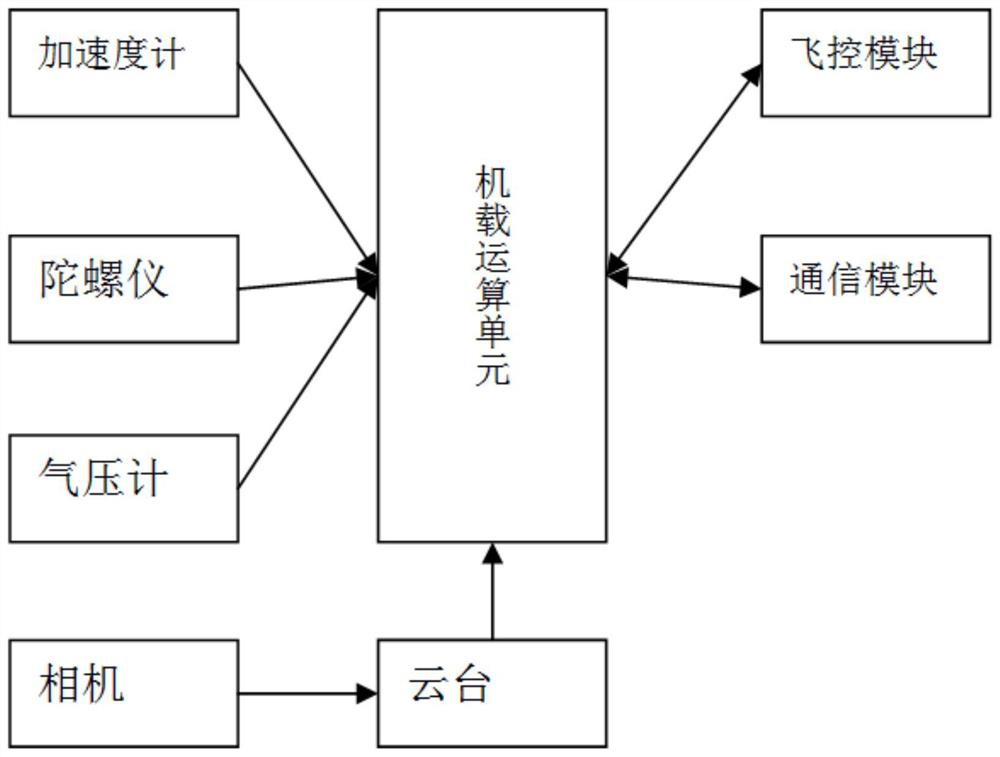
[0056] see figure 2 , UAV onboard control system includes gyroscope, accelerometer, barometer, gimbal, camera, flight control module, communication module and onboard computing unit, accelerometer is used to measure the three-axis acceleration of UAV; gyroscope is used It is used to measure the roll, yaw, and pitch angles of the UAV; the barometer is used to obtain the flight altitude of the UAV; the accelerometer, gyroscope and barometer are respectively connected to the onboard computing unit, and the camera is connected to the airborne computer via the gimbal. The computing unit is connec...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More