

Three-dimensional point cloud data acquisition method and acquisition system
A three-dimensional point cloud and data acquisition technology, applied in the field of surveying and mapping systems, can solve the problems of unsuitable for the promotion and use of three-dimensional measurement systems, complex structure and large volume of three-dimensional laser scanners, and achieve comprehensive coverage of three-dimensional point cloud information and convenient data. The effect of processing work, storage method is reasonable
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
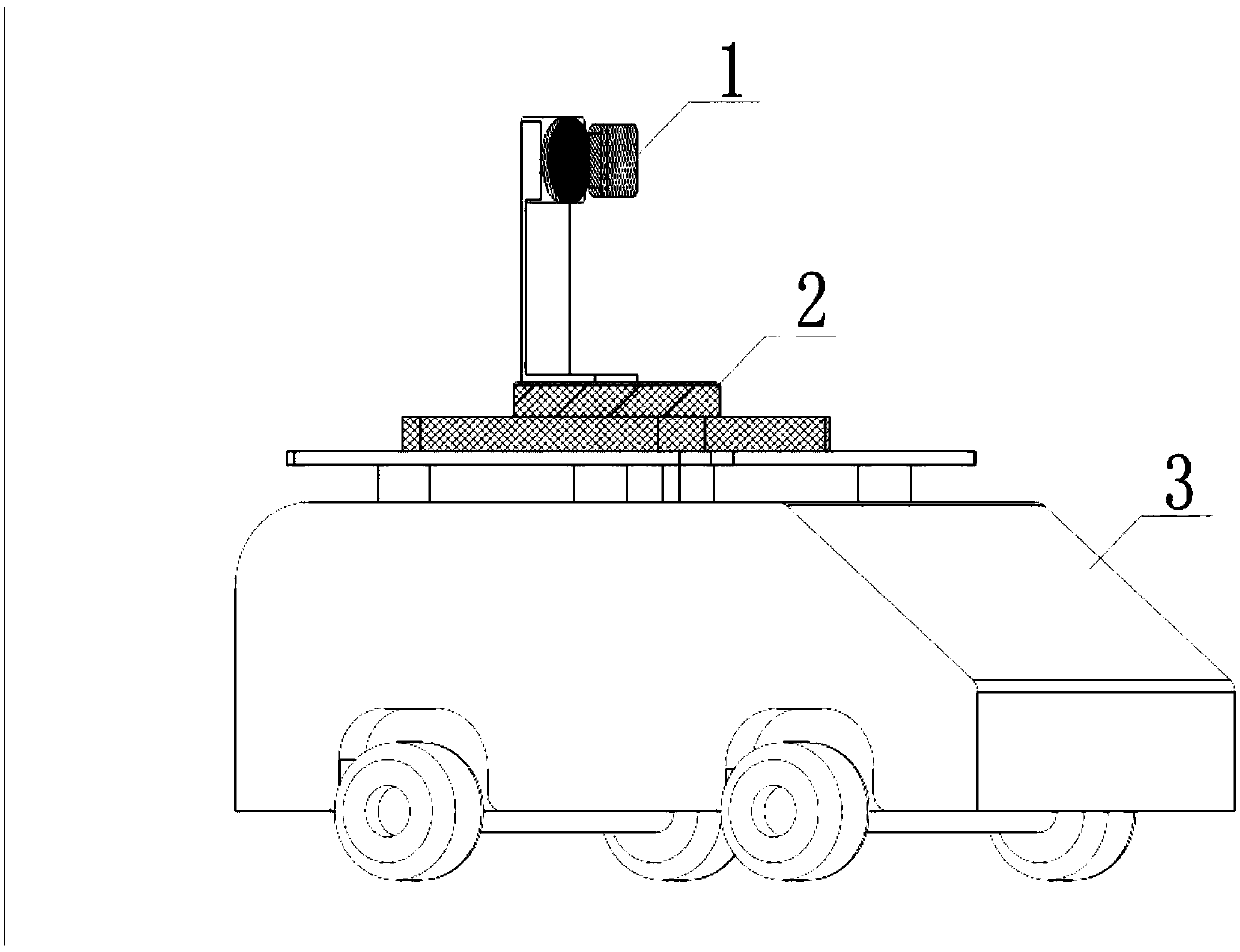
[0035] refer to Figure 1-3 , this embodiment shows a 3D point cloud data acquisition system, the 3D point cloud data acquisition device such as figure 1 As shown, it includes a mobile robot 1, a rotating gimbal 2, and a two-dimensional laser radar 3.
[0036] The mobile robot 1 can move freely on level ground and rough ground. The mobile robot 1 can provide motor driving power, and can provide power and a carrying platform to the rotating platform 2 .
[0037] The rotating platform 2 is mounted horizontally on the mobile robot 1. The rotating platform 2 can rotate horizontally. The horizontal rotation surface of the rotating platform 2 is parallel to the horizontal plane of the mobile robot 1. The horizontal direction of the rotating platform 2 can rotate at least 180 degrees. , the above-mentioned rotary pan / tilt 2 can communicate with the outside world through a serial port or a network port.
[0038] Described two-dimensional laser radar 3 is vertically connected on the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More