

Omni-directional mobile robot based on Mecanum wheel and control method thereof
A technology of omnidirectional movement and control method, applied in the field of omnidirectional mobile robots, can solve the problems of motor start-up stall, large braking inertia, large driving area, and single function of the robot, etc., to improve space utilization, self-weight and other problems Light, optimized driving effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] Specific embodiments of the present invention are described in detail below, but it should be understood that the protection scope of the present invention is not limited by the specific embodiments.
[0043] Unless expressly stated otherwise, throughout the specification and claims, the term "comprise" or variations thereof such as "includes" or "includes" and the like will be understood to include the stated elements or constituents, and not Other elements or other components are not excluded.
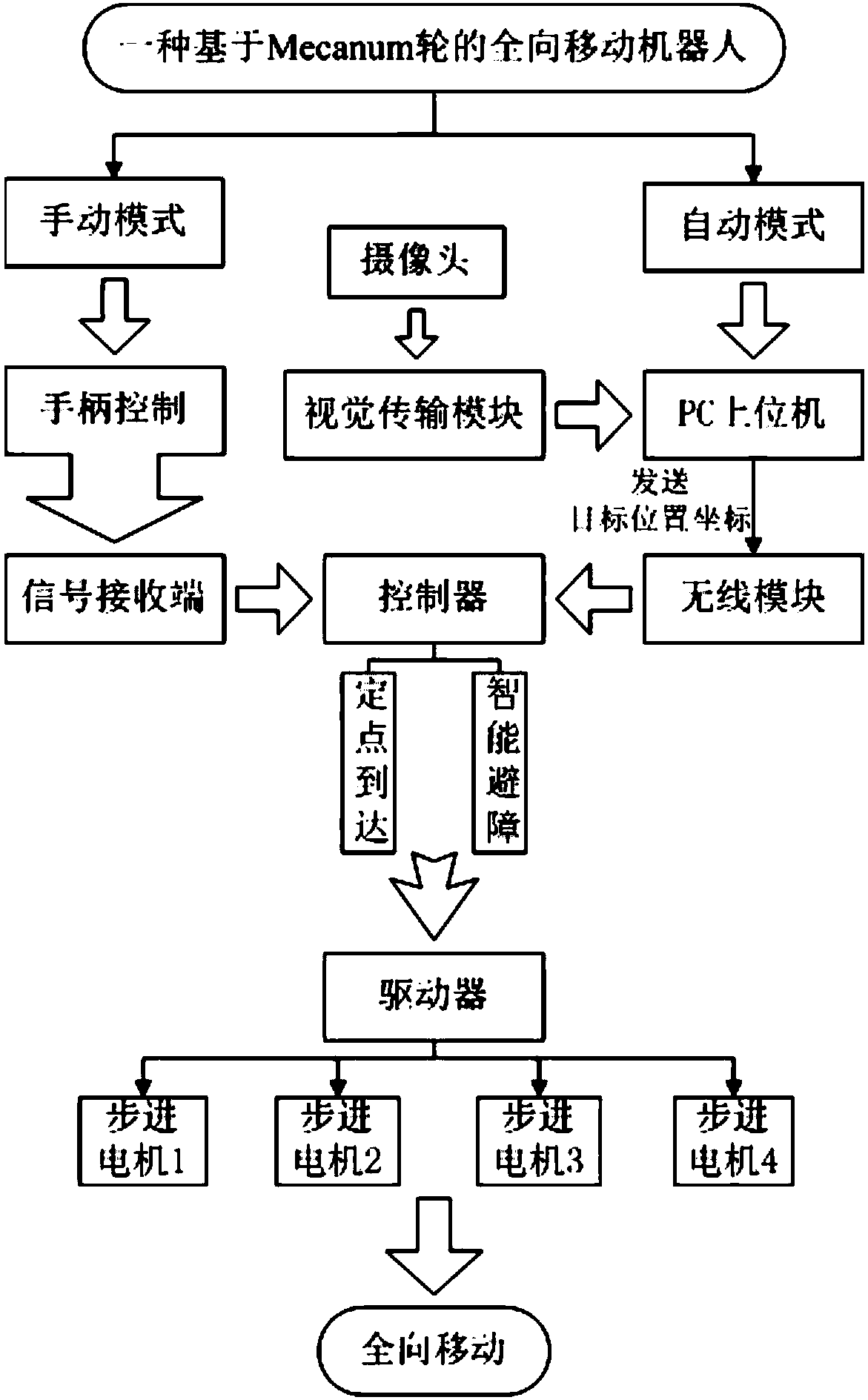
[0044] see figure 1 , an omnidirectional mobile robot based on Mecanum wheels, including manual and automatic modes. In manual mode, the handle sends instructions to the signal receiving end, and the controller sends pulse signals and direction signals to the driver according to the received instructions, and then the driver controls the operation of four stepping motors to realize omnidirectional movement; in automatic mode, the PC The upper computer sends the coordinates o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More