

Biped jumping robot with variable pneumatic muscle driving force arm
A pneumatic muscle and driving force technology, which is applied in motor vehicles, transportation and packaging, etc., can solve the problems of lack of bionicity and flexibility of robots, and heavy weight of robots, so as to achieve strong motion flexibility, improved stretching, and good bionicity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
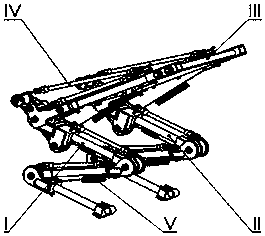
[0028] see Figure 1~Figure 11 , a bipedal jumping robot with variable arm driven by pneumatic muscles, including right leg (I), left leg (II), torso (III), muscle system (IV) and spring system (V). It is characterized in that: the right leg (I) and the left leg (II) are connected through two parallel hollow connecting rods (90, 93) through nuts, and connected with the trunk (III) as a whole; the left and right legs (I, II) have The left and right symmetrical mechanisms with the same configuration are each equipped with a muscle system and a spring system, and have a variable force arm device.
Embodiment 2
[0029] Embodiment 2: This embodiment is basically the same as Embodiment 1, and the special features are as follows:
[0030]The left and right legs (I, II) have the same left-right symmetrical configuration: including hip joints (98), knee joints (99), ankle joints (100), thighs (6), lower legs (8), tibia (10 ), foot (11), double-joint muscle moment arm changing device (102), hip joint moment arm changing device (101). Among them, the hip joint (98) and the knee joint (99) are connected with the thigh (6) through threads, the knee joint (99) and the ankle joint (100) are connected with the lower leg through threads, and the ankle joint (100) and the foot (11) are connected with the tibia (10) Connected by thread. The hip joint (98) is made up of the middle joint of the hip joint (58), the outer joint of the hip joint (56) and the lower pulley of the hip joint (96). The middle joint of the hip joint (58) and the outer joint of the hip joint (56) pass through the upper The ho...
Embodiment 3
[0032] Such as figure 1 , The biped jumping robot with variable arm driven by pneumatic muscles includes right leg (I), left leg (II), torso (III), muscle system (IV), and spring system (V). It is characterized in that: right leg (I) and left leg (II) are connected through central tube (90, 93); trunk (III) is connected with right leg (I) and left leg (II) through hollow tube (25, 94) .
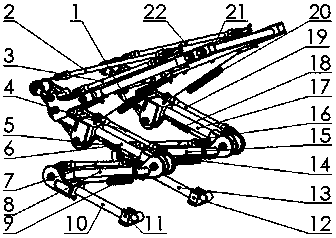
[0033] Such as figure 2 , the muscular system (IV) connects the trunk (III) and the hip joint (98) through the single-joint muscles Gmax-A (2) and Gmax-B (3), thereby controlling the extension of the trunk (III) and thigh (6); The muscular system (IV) connects the trunk (III) and the knee joint (99) through the double-joint muscle RF (4), thereby controlling the extension of the trunk (III) and lower leg (8); the muscular system (IV) through the single-joint muscle SOL (7) Connects the knee joint (99) to the ankle joint (100), thereby controlling the extension of the tibia (10).
[0034]...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More