

Hollow out barrier detection device and method for SLAM
An obstacle detection and obstacle detection technology, which is applied in the field of hollow obstacle detection devices, can solve problems such as inability to detect, high obstacle requirements, and restrictions on the application of SLAM technology, and achieve the effect of strong adaptability and wide application range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0046] This embodiment discloses a hollow obstacle detection device for SLAM, including a host, a laser radar, and a depth camera, and the host is connected to the laser radar and the depth camera respectively;
[0047] The laser radar is used to detect space, thereby obtaining laser radar data;
[0048] The depth camera is used to detect space, thereby obtaining simulated lidar data;
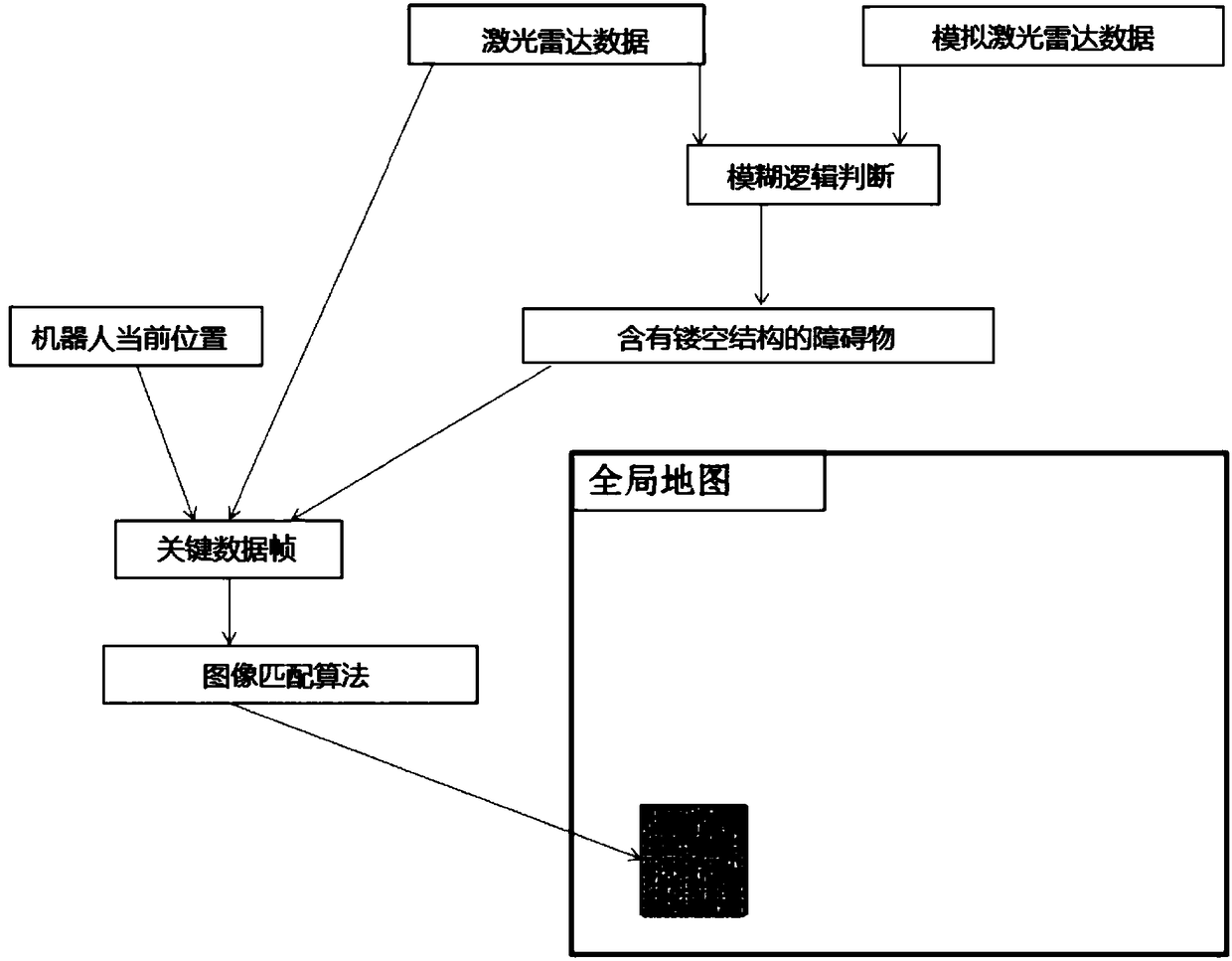
[0049] The host is used to perform fuzzy logic judgment according to the lidar data and simulated lidar data in the overlapping field of view of the lidar and the depth camera, and obtain the detection of obstacles containing hollow structures according to the result of the fuzzy logic judgment result.
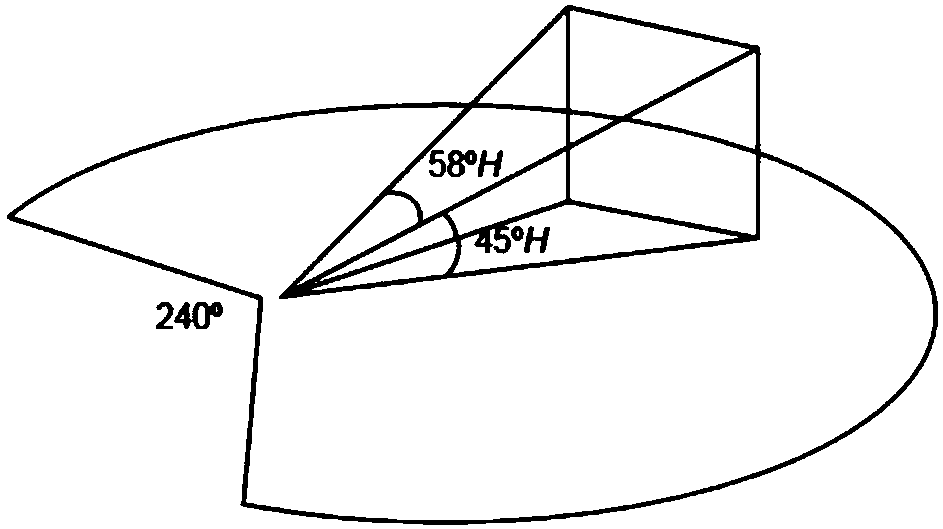
[0050] SLAM technology is applied in the field of robotics, so the host, lidar and depth camera can all be installed on the robot. Both the lidar and the depth camera detect the space, and the data detected by the lidar are used to build a global map in the existing SLAM technology. The data...
Embodiment 2
[0056] This embodiment will illustrate a hollow obstacle detection method for SLAM, which can be realized by the hollow obstacle detection device for SLAM described in Embodiment 1.
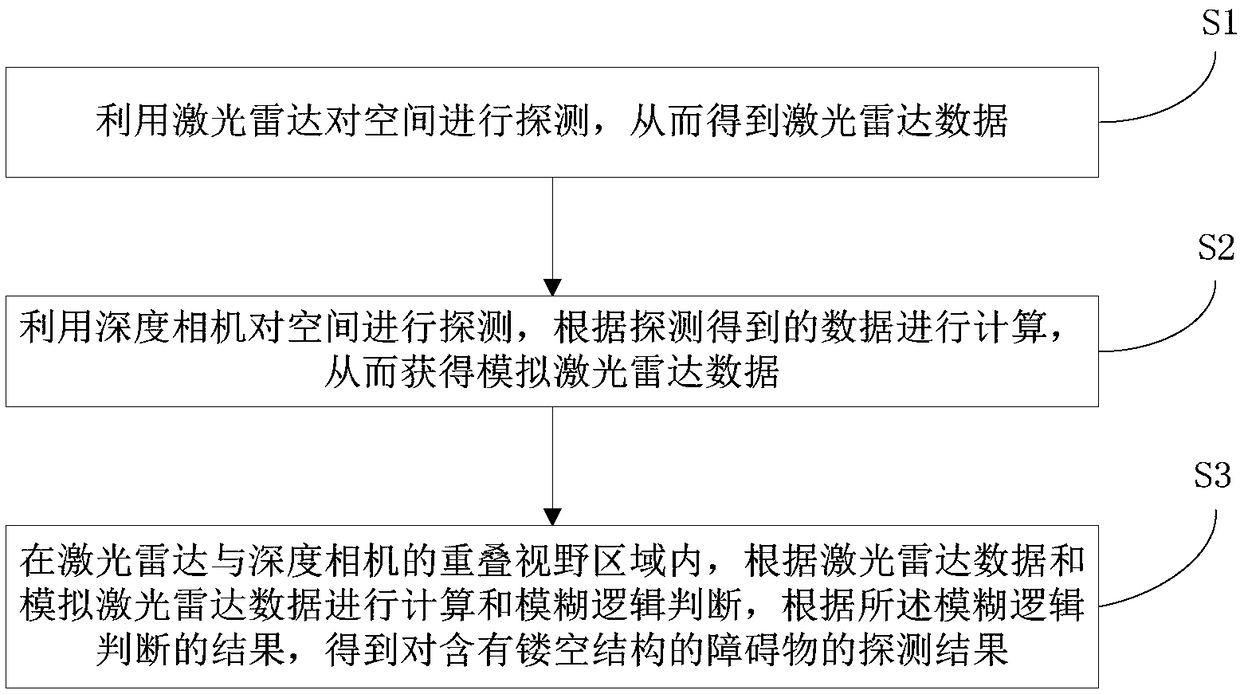
[0057] A hollow obstacle detection method for SLAM, such as figure 2 shown, including the following steps:
[0058] S1. Use laser radar to detect space, so as to obtain laser radar data;
[0059] S2. Use the depth camera to detect the space, and calculate according to the data obtained by the detection, so as to obtain the simulated lidar data;
[0060] S3. In the overlapping field of view of the laser radar and the depth camera, calculation and fuzzy logic judgment are performed according to the laser radar data and the simulated laser radar data, and the detection result of the obstacle containing the hollow structure is obtained according to the result of the fuzzy logic judgment. .
[0061] Further as a preferred implementation manner, the step S2 specifically includes:
[0062] S21. Use...
PUM
| Property | Measurement | Unit |
|---|---|---|
| Angle of view | aaaaa | aaaaa |
| Horizontal viewing angle | aaaaa | aaaaa |
Abstract
Description
Claims
Application Information
 Login to View More
Login to View More