

Unmanned ship obstacle avoiding device and method based on image vision
An image vision, unmanned ship technology, applied in image enhancement, image analysis, image data processing and other directions, to effectively detect and segment water obstacles and improve the accuracy of obstacle avoidance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The technical solution of the present invention will be specifically described below in conjunction with the accompanying drawings.
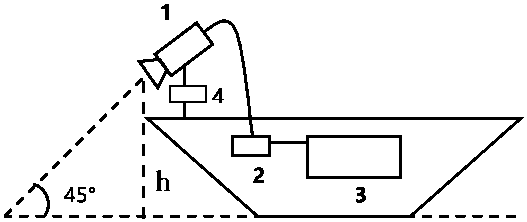
[0022] A kind of unmanned ship obstacle avoidance device based on image vision of the present invention comprises camera 1, image processor 2, hull controller 3 and platform 4, and described camera is through image processor and hull controller, and described camera is set It is fixed on the head of the unmanned ship at an angle to the water surface through the control of the cloud head, so as to take images of the water surface in front of the unmanned ship. The camera is a CCD camera, the image processor is a Raspberry Pi 3B control board, the hull controller is an STM32 controller, the CCD camera is connected with the Raspberry Pi 3B control board through a USB interface, and the Raspberry Pi 3B control board Data transmission with STM32 controller through RS232 serial port.
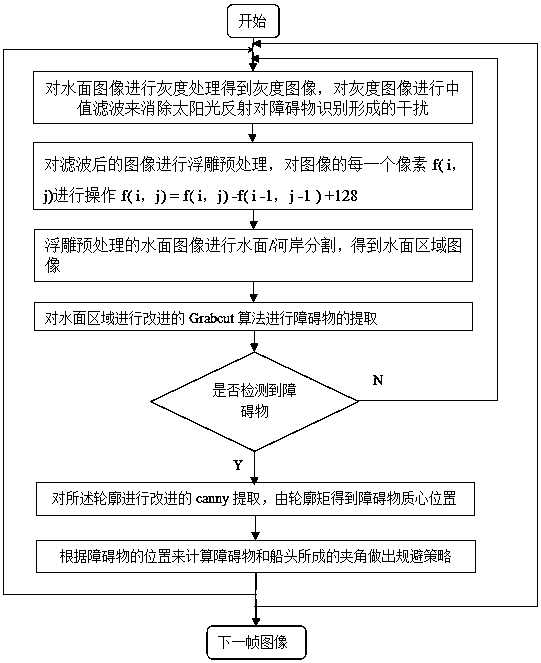
[0023] When the unmanned ship is sailing, the image proces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More