Human-machine cooperation system gesture recognition control method based on deep learning
A gesture recognition, human-machine collaboration technology, applied in neural learning methods, character and pattern recognition, computer parts and other directions, can solve problems such as low accuracy, unsafe hidden dangers, and machine injury, achieve high accuracy and solve collaborative safety problems. and the effect of high precision work problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0019] The present invention is a gesture recognition control method of a human-computer cooperation system based on deep learning, comprising the following steps:
[0020] Step 1. Track the gesture in real time and obtain the gesture image of the operator;
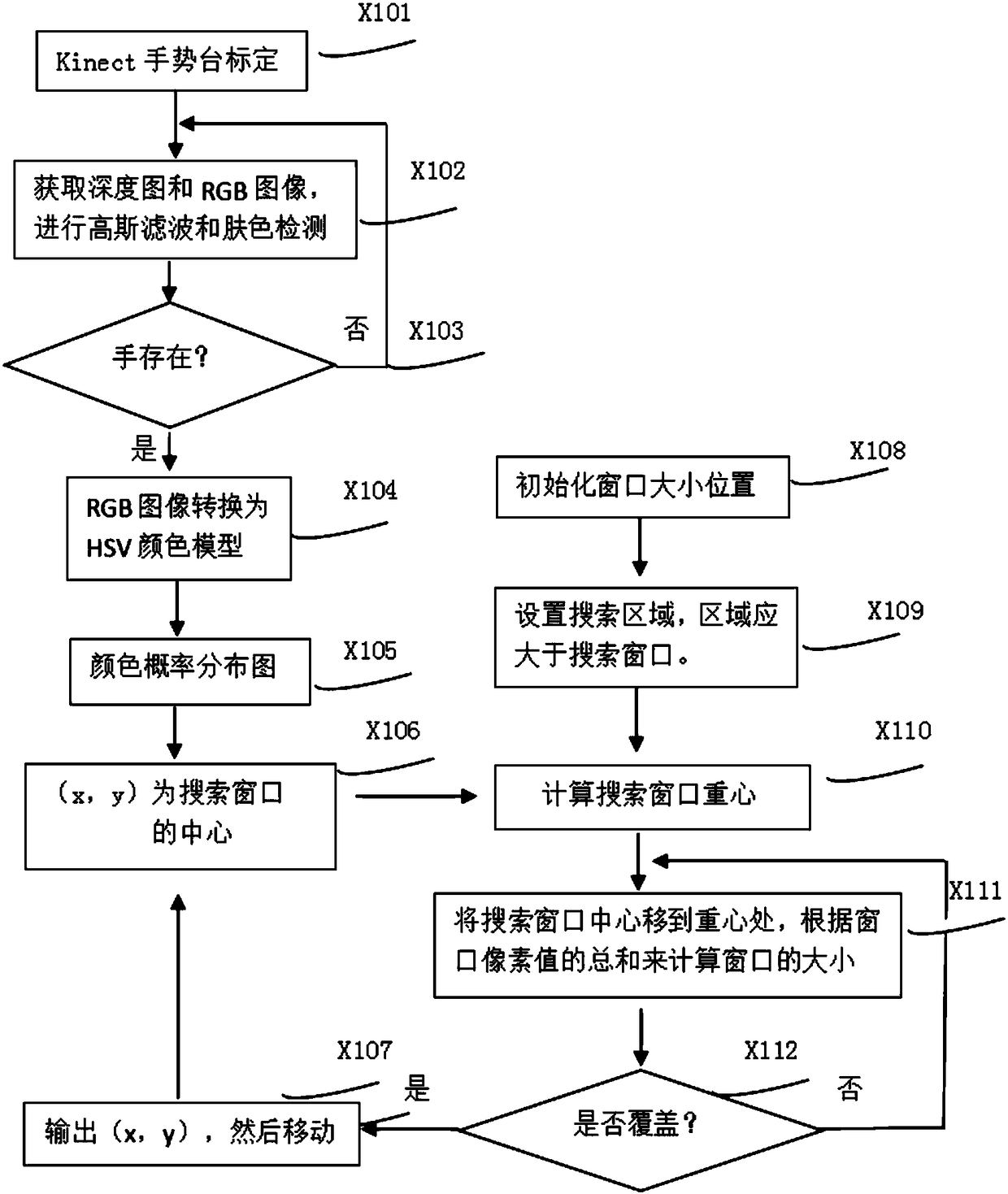
[0021] In step 1, the real-time tracking of the gesture and the acquisition of the operator's gesture image specifically include: using the kinect somatosensory camera to collect the user's gesture image; using the camshift tracking algorithm to confirm that the gesture image is within the collection range, and performing real-time tracking and sampling; The operator's gesture RGB image and depth image are transmitted to the PC through USB for processing.
[0022] Use the camshift tracking algorithm to confirm that the gesture image is within the collection range, and perform real-time ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More