

Three-joint bionic mechanical leg capable of being assembled conveniently with autonomous distribution power
A technology of bionic mechanical legs and three joints, applied in the field of bionic robots, can solve the problems of inconvenient disassembly and maintenance, low charging efficiency, small joint torque, etc., and achieve the effect of improved reliability of the whole machine, simple structure and large joint torque
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
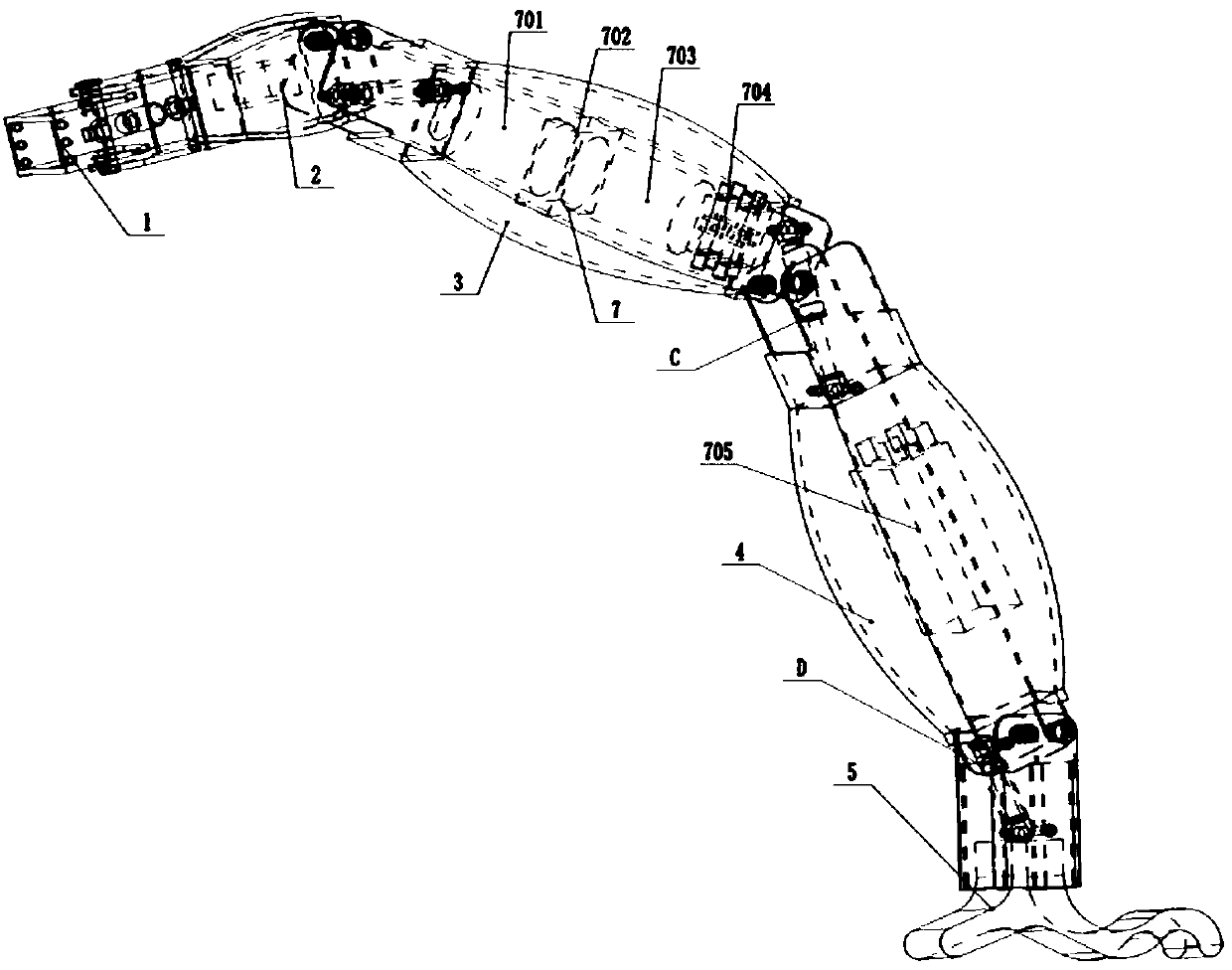
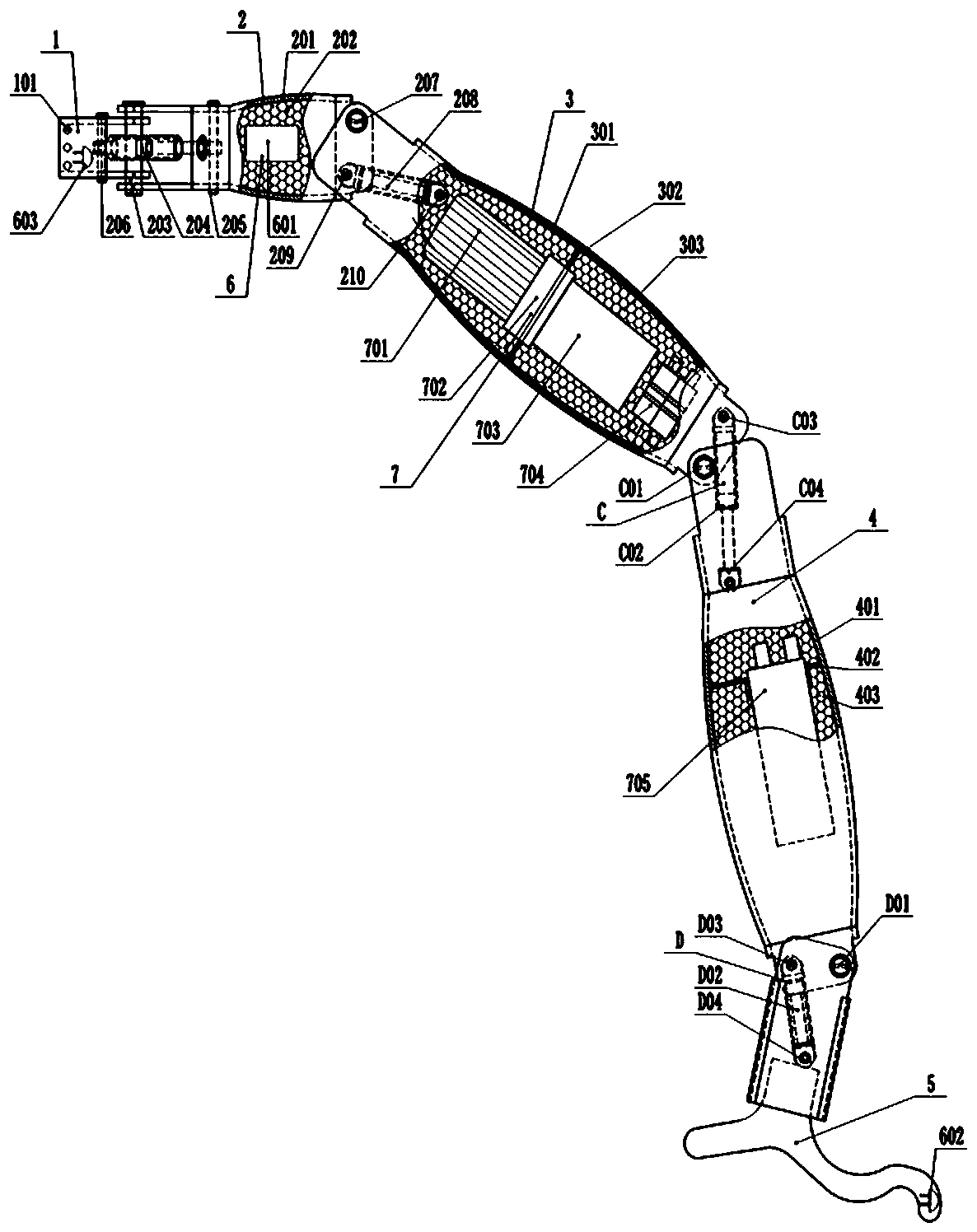
[0027] refer to figure 1 , figure 2, the present embodiment is a three-joint bionic mechanical leg with autonomous distribution of power, which has four degrees of freedom; it mainly includes a connecting frame 1, a three-dimensional joint 2, a thigh 3, a two-dimensional joint C, a calf 4, a two-dimensional joint D, and an elastic foot 5. Hydraulic power system 7, control device 6, hinge pin A, hinge pin B; connecting frame 1 is hinged through three-dimensional joint 2 and thigh 3; thigh 3 is hinged through two-dimensional joint C and lower leg 4; lower leg 4 is hinged through two-dimensional joint D It is hinged with the elastic foot 5; the connecting frame 1 is used to fixedly connect or disassemble the bionic mechanical leg with the bionic robot; the hydraulic power system 7 is fixed in the leg body of the thigh 3 and the calf 4, and is respectively connected with the three-dimensional joint 2, The hydraulic interfaces of the two-dimensional joint C and the two-dimensiona...
Embodiment 2
[0033] refer to image 3 , Figure 4 , the present embodiment is a three-joint bionic robot leg with autonomous distribution of power, which has four degrees of freedom. The main difference from Embodiment 1 is that the connecting frame 1 is provided with bolt mounting holes 102 to connect with the main body of the bionic robot; the thigh 3, calf 4 A circular member with a cavity is made of titanium alloy, wherein the thigh 3 and the lower leg 4 are provided with a solar thin film I 304, a solar thin film 404 is used for power generation; the elastic foot 5 adopts a hoof shape and is provided with a rubber damping member 501 and a piezoelectric member 502, which can realize vibration reduction and generate power by using walking vibration impact at the same time; the controller 601 is arranged in the thigh 3 and uses wireless bluetooth to transmit The device 603 replaces the electric plug-in and connects with the main body, and uses the wireless charging port 602 to charge t...
Embodiment 3
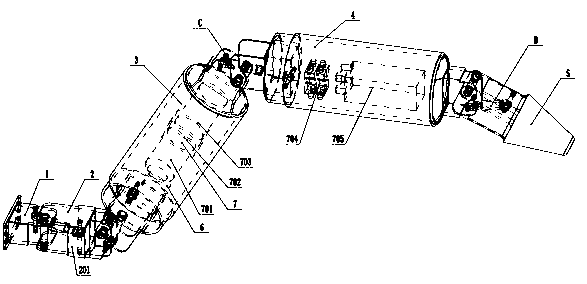
[0035] refer to Figure 5 , Figure 6 In this embodiment, the portable multi-joint bionic mechanical leg with autonomously distributed power has 4 degrees of freedom, and the main difference from Embodiment 1 is that the connecting frame 1 is provided with a card slot and a fixed pin hole 103 to connect with the main body of the bionic robot; the thigh 3. The calf 4 is made of aluminum alloy and is a square member with a cavity; the elastic foot 5 adopts a hoof shape and is provided with a leaf spring type vibration-absorbing and damping material 501; the controller 601 is arranged in the thigh 3; the hydraulic solenoid valve 704 is fixed on Upper leg 4; joint oil cylinder A204, joint oil cylinder B208, joint oil cylinder C02, and joint oil cylinder D02 use ordinary oil cylinders, and through the angle sensor I211, angle sensor 212. Angle sensor C05, angle sensor D05 to feed back the swing angle of the joint in real time; the joint is equipped with a multi-link mechanism...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More