Road-section-pedestrian-crossing control method based on machine vision
A technology of machine vision and pedestrian crossing, applied in the control of pedestrian guide lights, traffic control system of road vehicles, traffic control system, etc., can solve the waste of road resources, difficulty in adapting to road traffic conditions, and difficulty in meeting urban traffic management, etc. problems, to achieve the effect of improving traffic capacity, alleviating traffic congestion, and alleviating traffic congestion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] The present invention will be further described below in conjunction with the accompanying drawings.
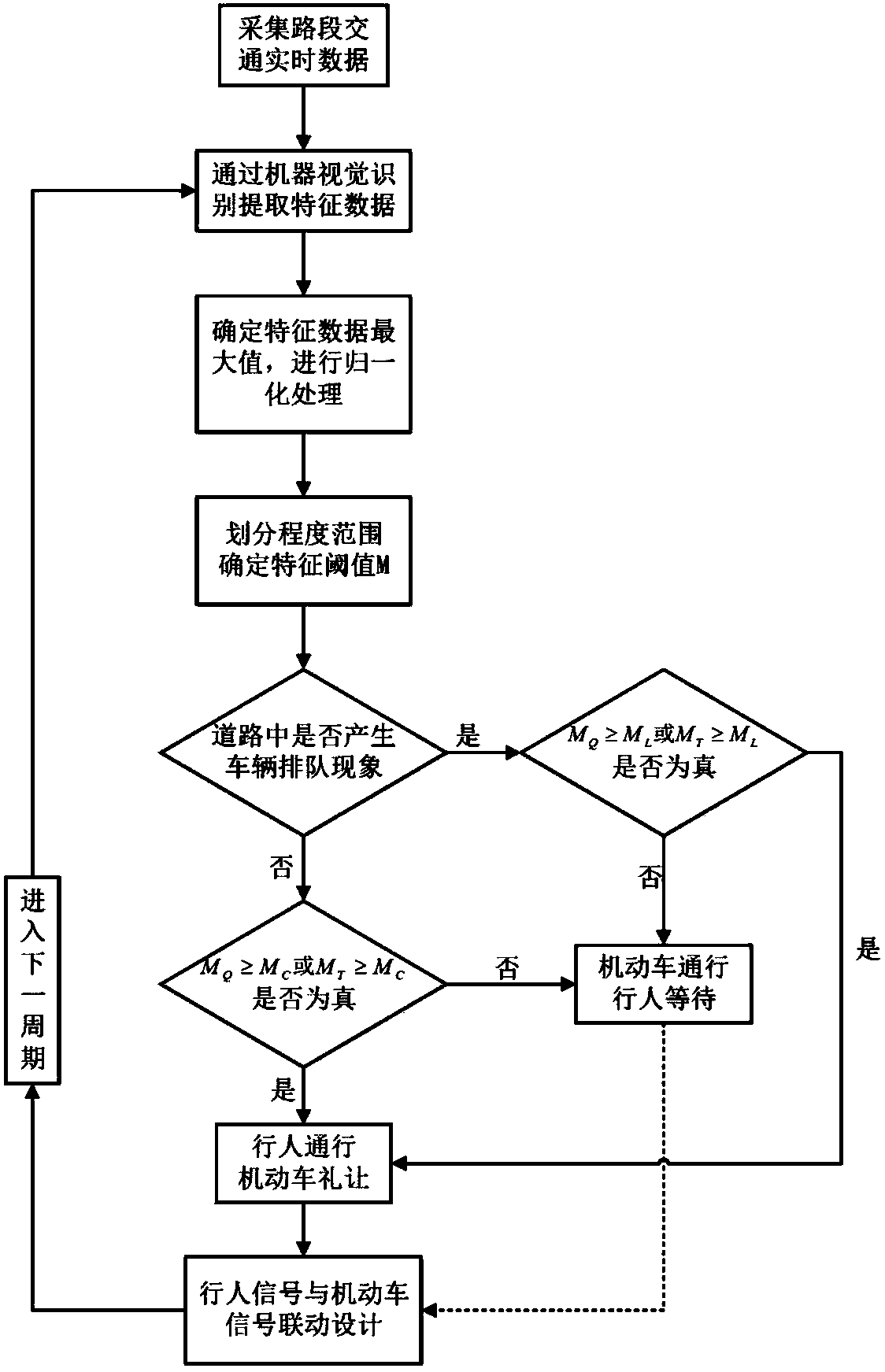
[0035] Such as figure 1 Shown, a kind of section pedestrian crossing control method based on machine vision, the realization process of described method is as follows:
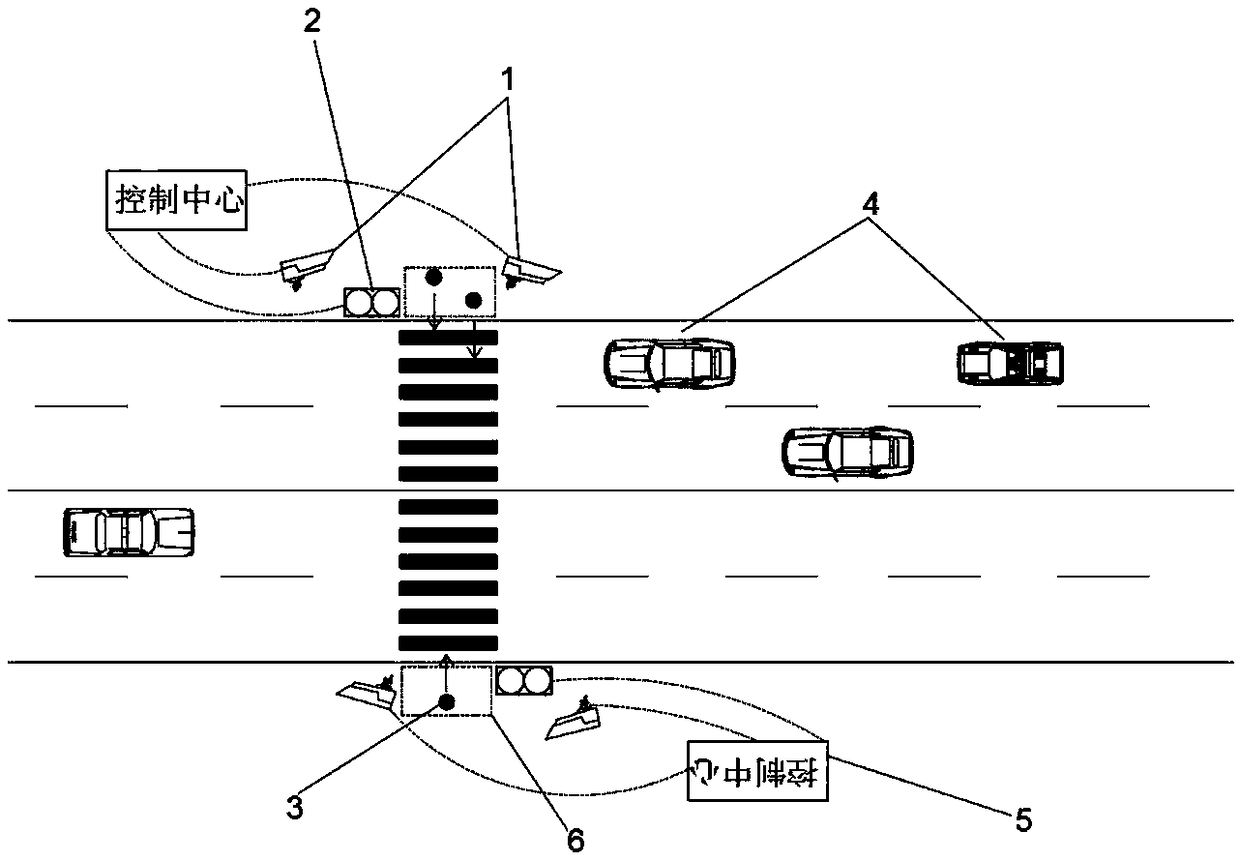
[0036] 1) Set up two surveillance cameras on the railing of the signal light, one is aimed at the pedestrian waiting area to capture pedestrian information, and the other is aimed at the road to record the actual operation status of the road; the extracted features mainly include: the number of pedestrians in the waiting area , pedestrian waiting time, road traffic flow, motor vehicle queuing length; the number of pedestrians is mainly identified and counted through the Faster-RCNN method based on deep learning, and the pedestrian waiting time needs to be calculated using the pedestrian tracking algorithm based on HOG and Haar features. The road traffic flow can be accurately detected by the optical f...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More