

Stacking-preventing type transporting and encasing device on small fruit picking robot
A picking robot and stacking technology, applied in the field of agricultural machinery, can solve the problems of high degree of mechanical damage to fruit and low degree of automation.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
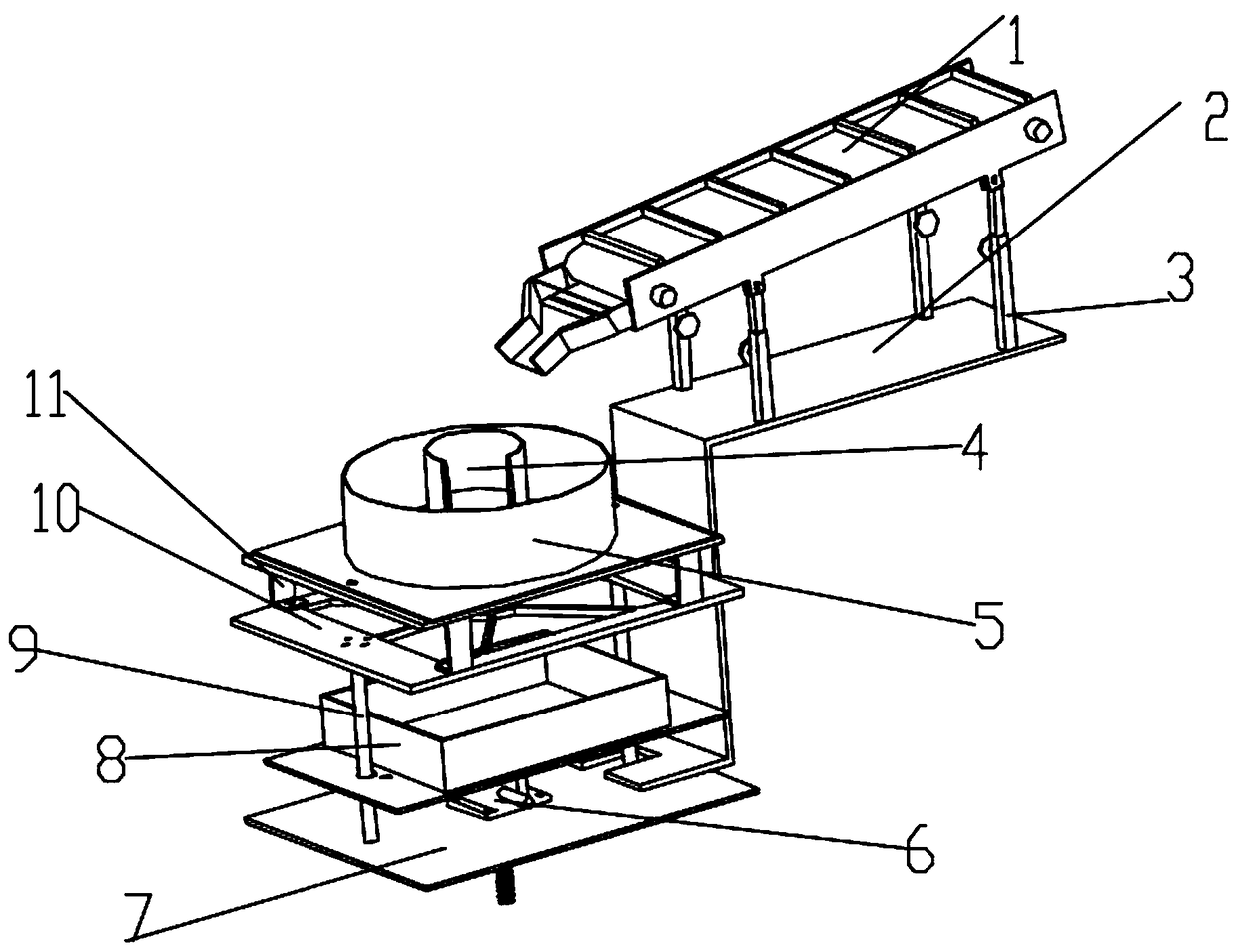
[0019] see figure 1 An anti-stacking carrying and packing device on a small fruit picking robot includes a fruit conveyor belt, a fruit dispersion packing mechanism, a fruit box position adjustment mechanism, a supporting mechanism and a control system.
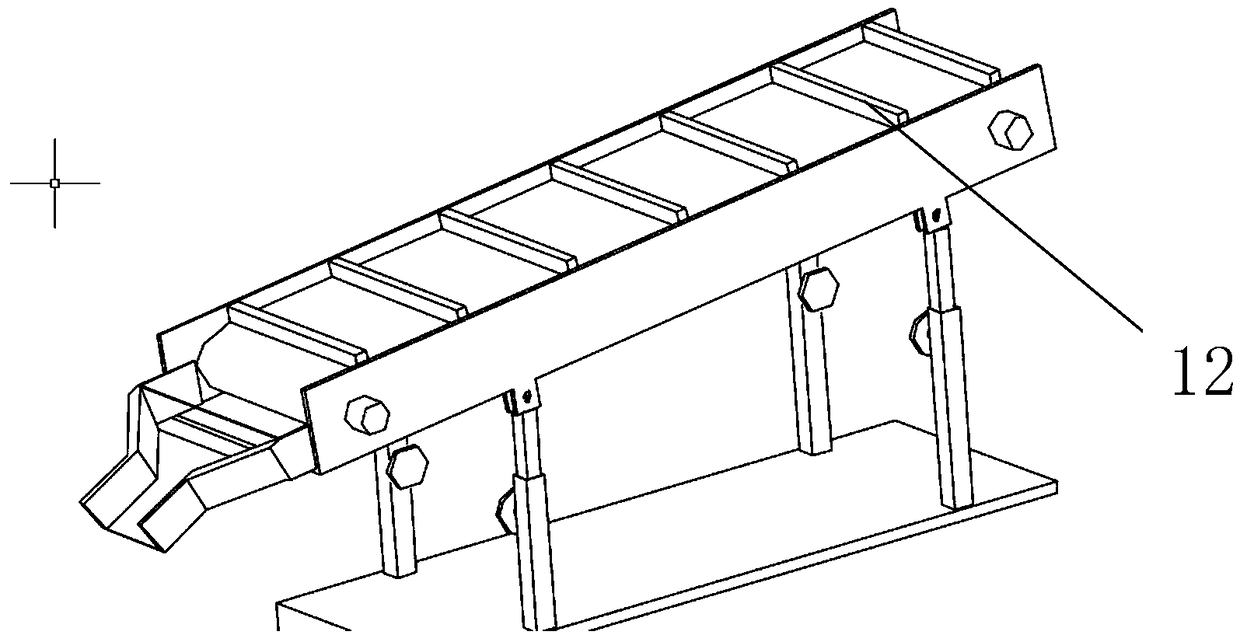
[0020] The fruit conveyor belt 1 is driven by a servo motor, and the conveyor belt is equipped with strip-shaped protrusions 12 to prevent the fruit from falling directly and causing damage to the fruit. At the same time, the support plate 2 is equipped with a height-adjustable device 3, which can adjust the transportation height and angle according to actual needs. When the fruit is transported to the conveyor belt, the motor rotates to drive the conveyor belt to transport the fruit, so that the fruit falls into the fruit dispersion packing mechanism.
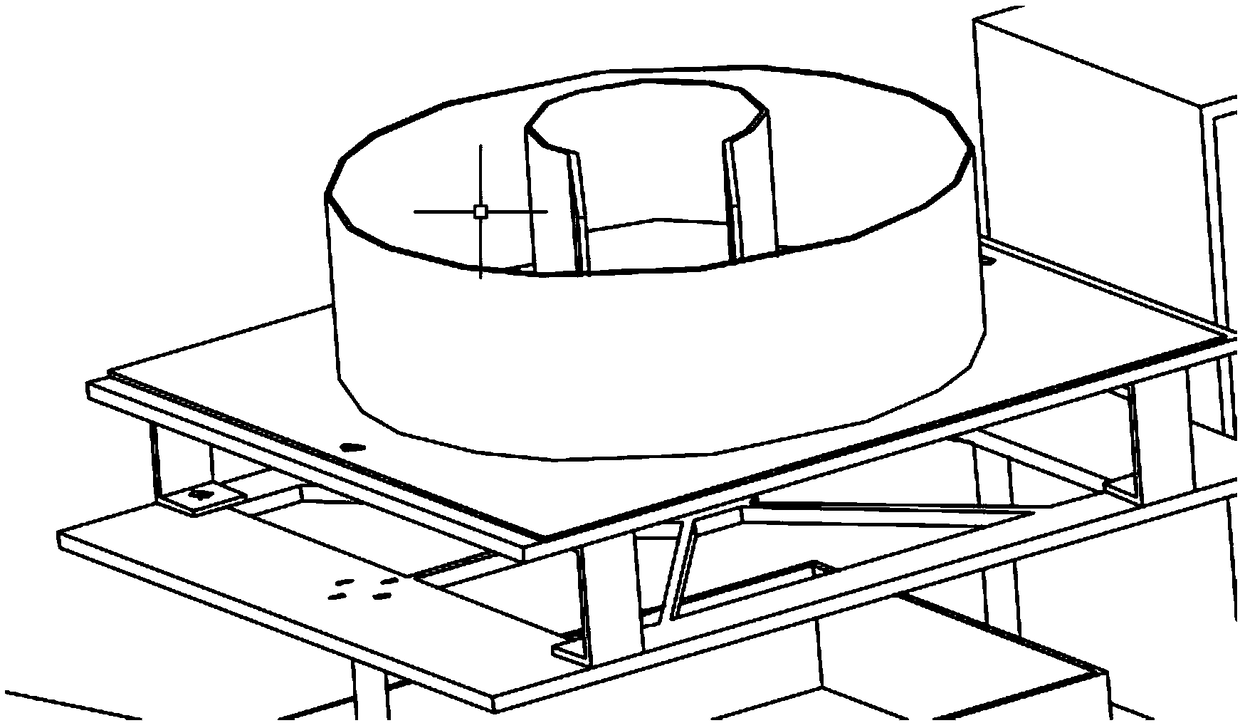
[0021] The fruit dispersing boxing mechanism is mainly composed of a rotating device 4 and a separating disc 5. The fruit falls into the rotating device, and the rotating dev...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More