

Tri-axial platform servo motor control method based on combination of BP neural network and active disturbance rejection controller
An active disturbance rejection controller and BP neural network technology, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of many ADRC parameters, great influence of state estimation, time-consuming and labor-intensive problems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
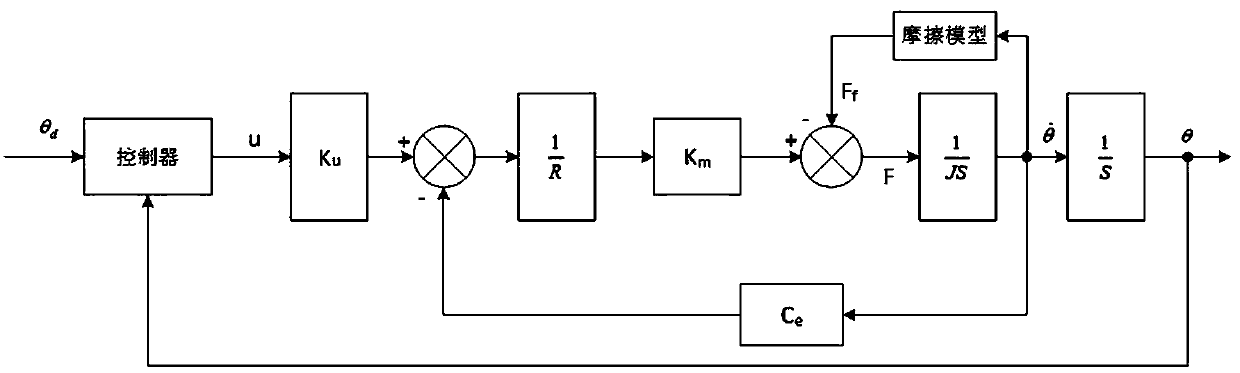
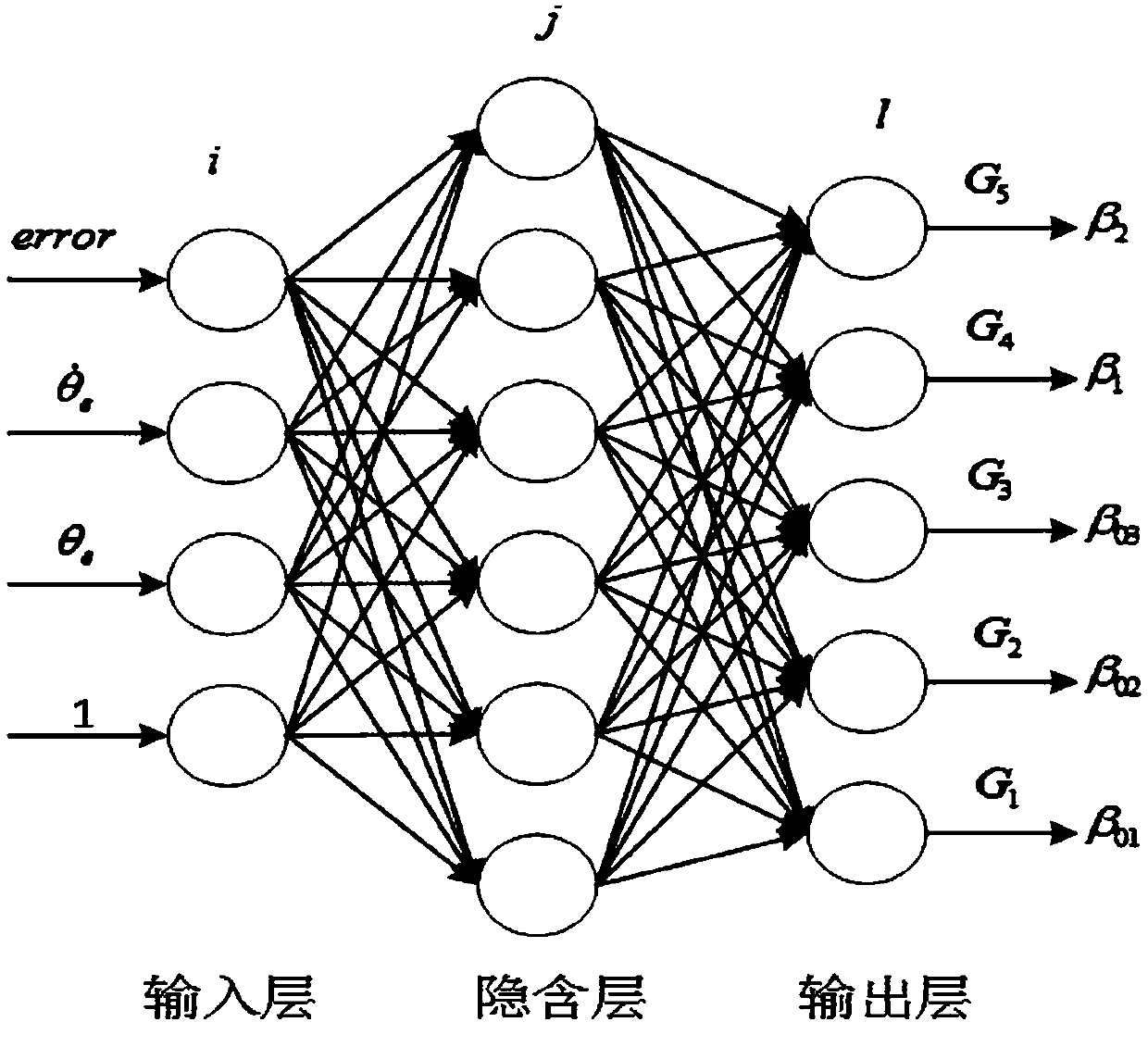
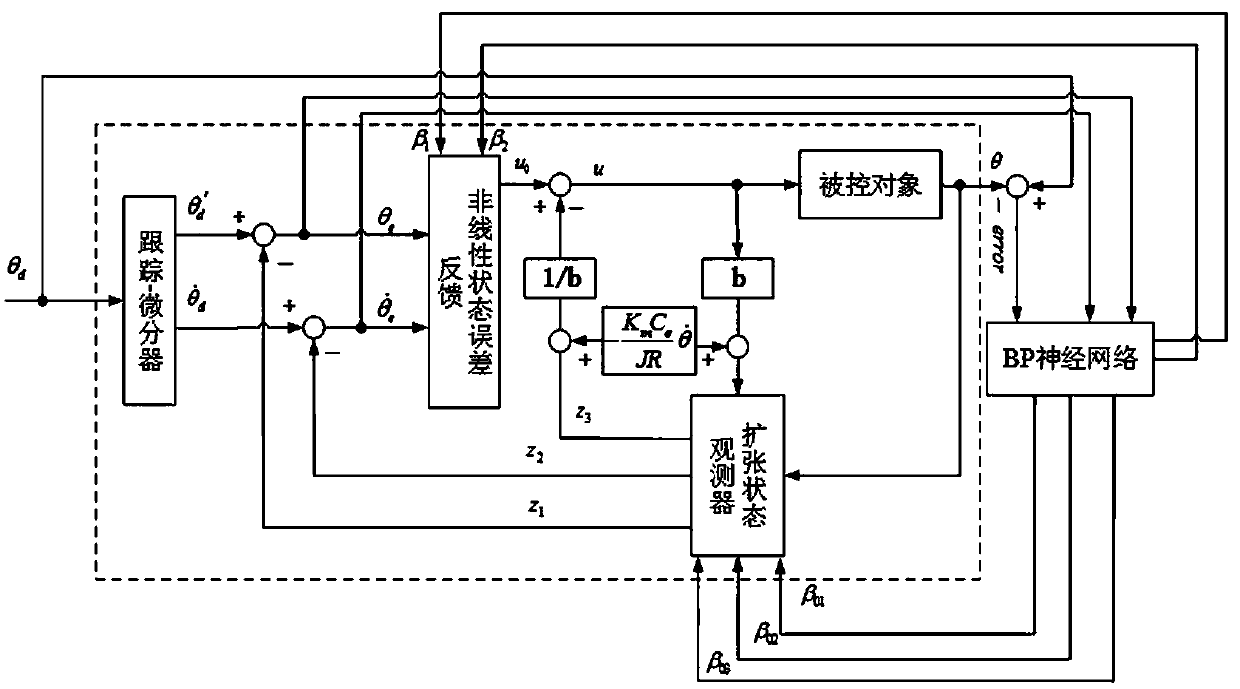
[0082] A control method based on a BP neural network combined with an active disturbance rejection controller for a three-axis pan-tilt servo motor, the method ignores the armature inductance of the three-axis pan-tilt servo system containing a friction model, and the three-axis The current loop and speed loop of the pan / tilt servo system are both open loops, the position loop is closed loop, and the entire three-axis pan / tilt servo system with friction model is a closed-loop feedback system. The friction link is regarded as a part of the total disturbance of the servo system. The extended observer in the anti-disturbance controller estimates and compensates the friction torque in real time, and the three parameters of the extended state observer in the active disturbance rejection controller of the three-axis pan-tilt servo system with friction model are analyzed by using BP neural network beta 01 , β 02 , β 03 and the two parameters β of the nonlinear state error feedback ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More