

Sensing information fusion method
A fusion method and sensor information technology, applied in the field of sensor information fusion, can solve the problems of large blind spot of the body, inability to meet the needs of comprehensive monitoring of unmanned sweepers, poor safety, etc., and achieve accurate obstacle avoidance decision-making and obstacle avoidance. Control, realize unmanned automatic driving cleaning, strengthen the effect of intelligence
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The technical solutions of the present invention will be described in further detail below with reference to the accompanying drawings and embodiments.
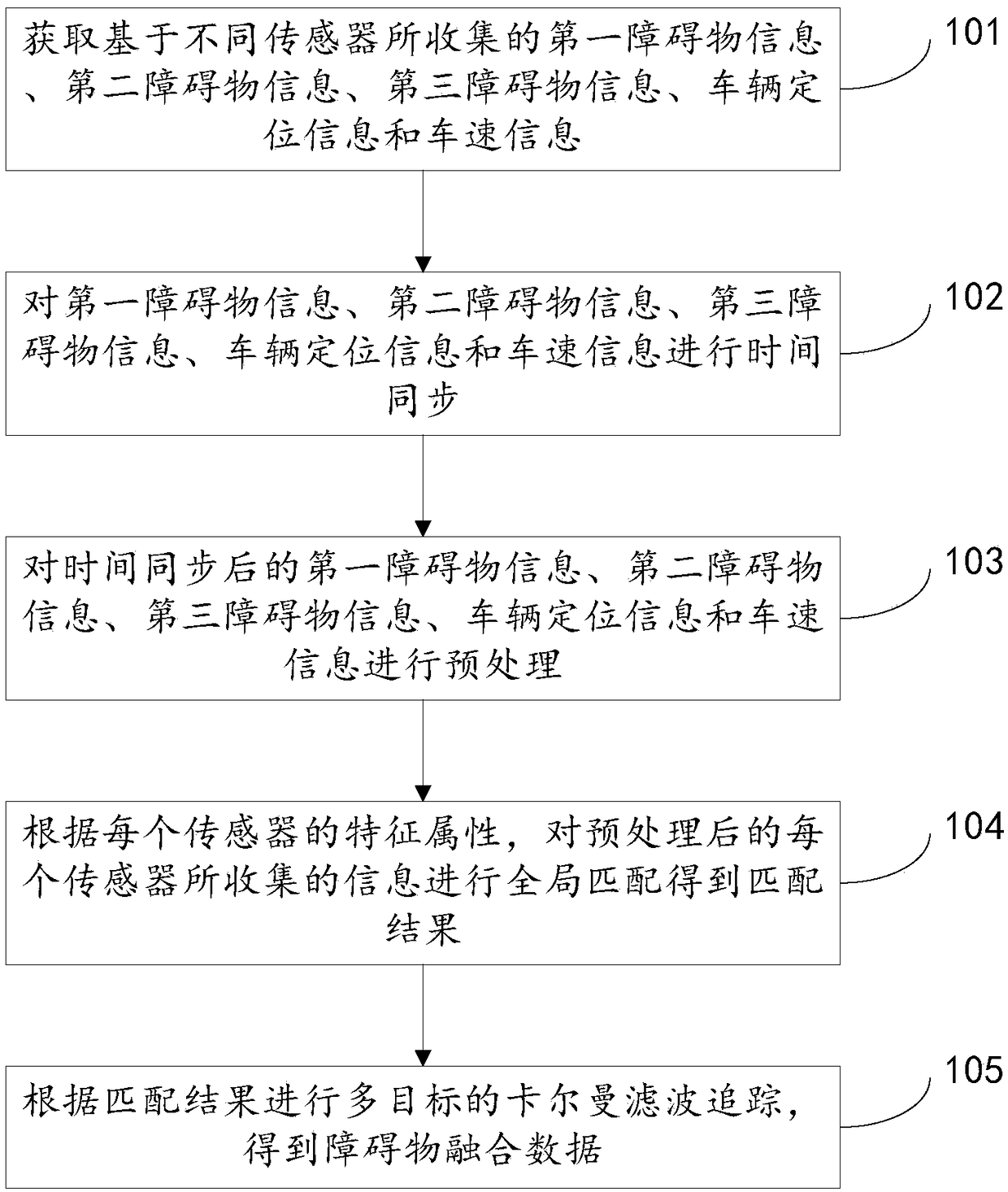
[0039] The embodiment of the present invention relates to the sensing information fusion method provided, which optimizes the characteristics of each sensor to fuse the corresponding data, better realizes the driverless sweeper's perception of the environmental road conditions, and obtains more accurate and comprehensive obstacle data Information, so as to make more accurate obstacle avoidance decisions and obstacle avoidance control, and strengthen the intelligence of the vehicle.
[0040] The execution end in the sensing information fusion method of the present application is the main processing controller of the vehicle, and the sensing sensors for multi-sensor information fusion include laser radar, ultrasonic radar, camera, differential GPS and wheel speed sensors.
[0041] Among them, the laser radar is used to d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More