Multi-agent cognitive planning algorithm based on heuristic search
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A heuristic search and multi-agent technology, applied in the computer field, can solve problems such as insufficient expression ability, poor scalability, and limited depth of belief nesting, and achieve good versatility and scalability
Inactive Publication Date: 2018-10-12
SUN YAT SEN UNIV
View PDF4 Cites 0 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
Since then, Muise et al. have proposed another restricted framework based on two assumptions that do not allow the disjunctive formula and the root agent that takes the entire knowledge base as the belief, but this method also has insufficient expressive ability and acceptable belief nesting. limited depth
[0005] In addition, Huang et al. proposed a general framework for multi-agent cognitive planning based on high-level belief change. This method only considers the common knowledge at the propositional level, and proposes an alternating cover disjunctive paradigm (ACDF) to represent agent knowledge. Library and action, and given the knowledge reasoning and evolution algorithm based on ACDF, and finally based on the PrAO algorithm of breadth-first search to realize the multi-agent cognitive planner MEPK, the limitation of this method lies in its poor scalability, because MEPK is based on the simple The forward state spacesearch algorithm lacks an effective heuristic search method. Therefore, when the scale of test cases and the search space increase, MEPK will expand too many meaningless nodes during the search process, thereby greatly reducing the efficiency of the planner.
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
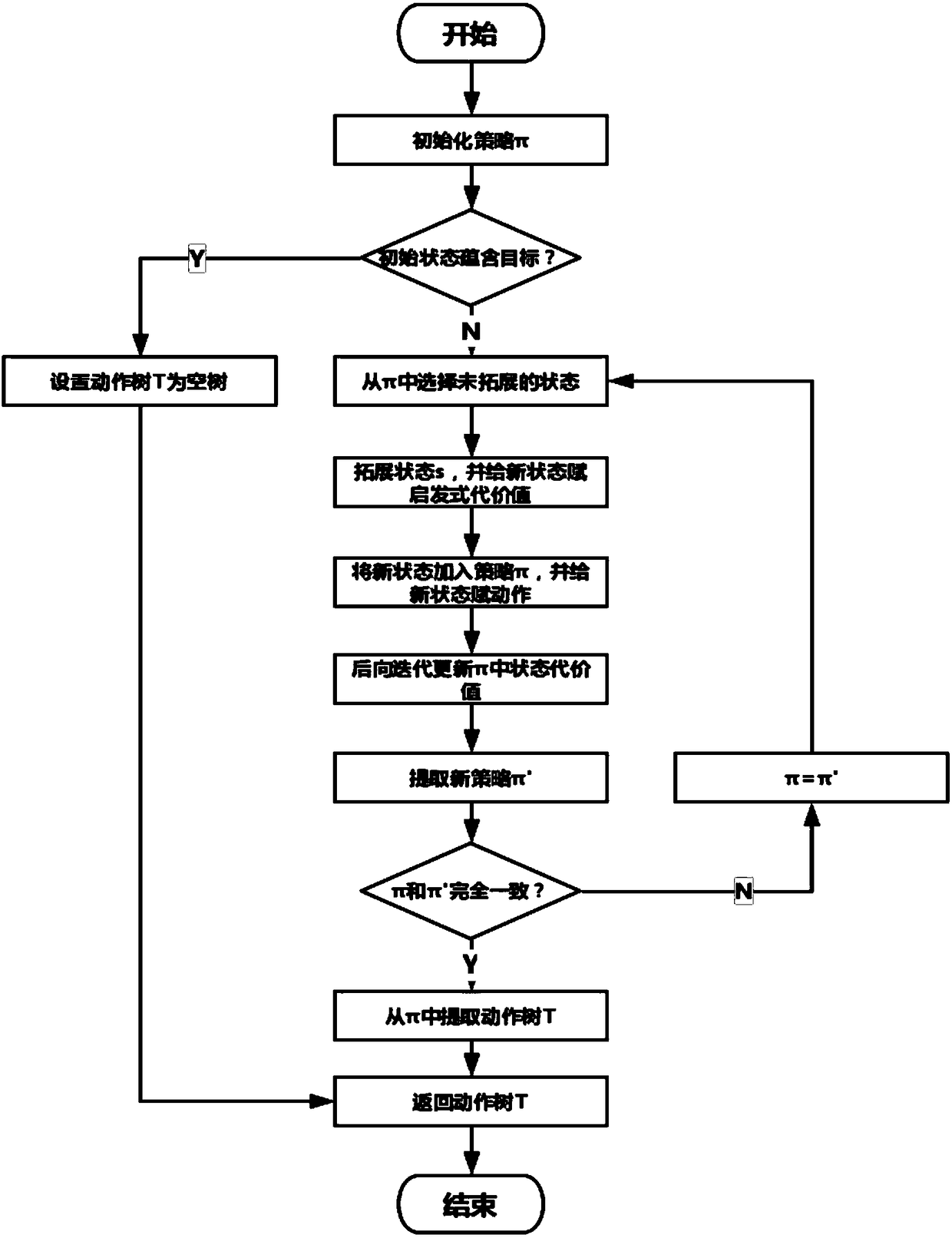
[0067] In this embodiment, there are three objects a, b, and c. It is known that one or two of them carry materials on their bodies. The three objects can check whether other objects carry materials on their bodies, but they cannot check themselves, and they can ask other objects Whether they are aware of their own situation, and the person being asked will answer honestly. The initial state is that a does not know whether he has materials on his body, and the goal is that a knows whether he has materials or not. The steps are as follows figure 1 As shown, the problem is modeled according to the multi-agent cognitive planning framework proposed in Huang's literature, and the initial state I, goal G, constraint γ, perceptual action set S, and deterministic action set D are obtained.
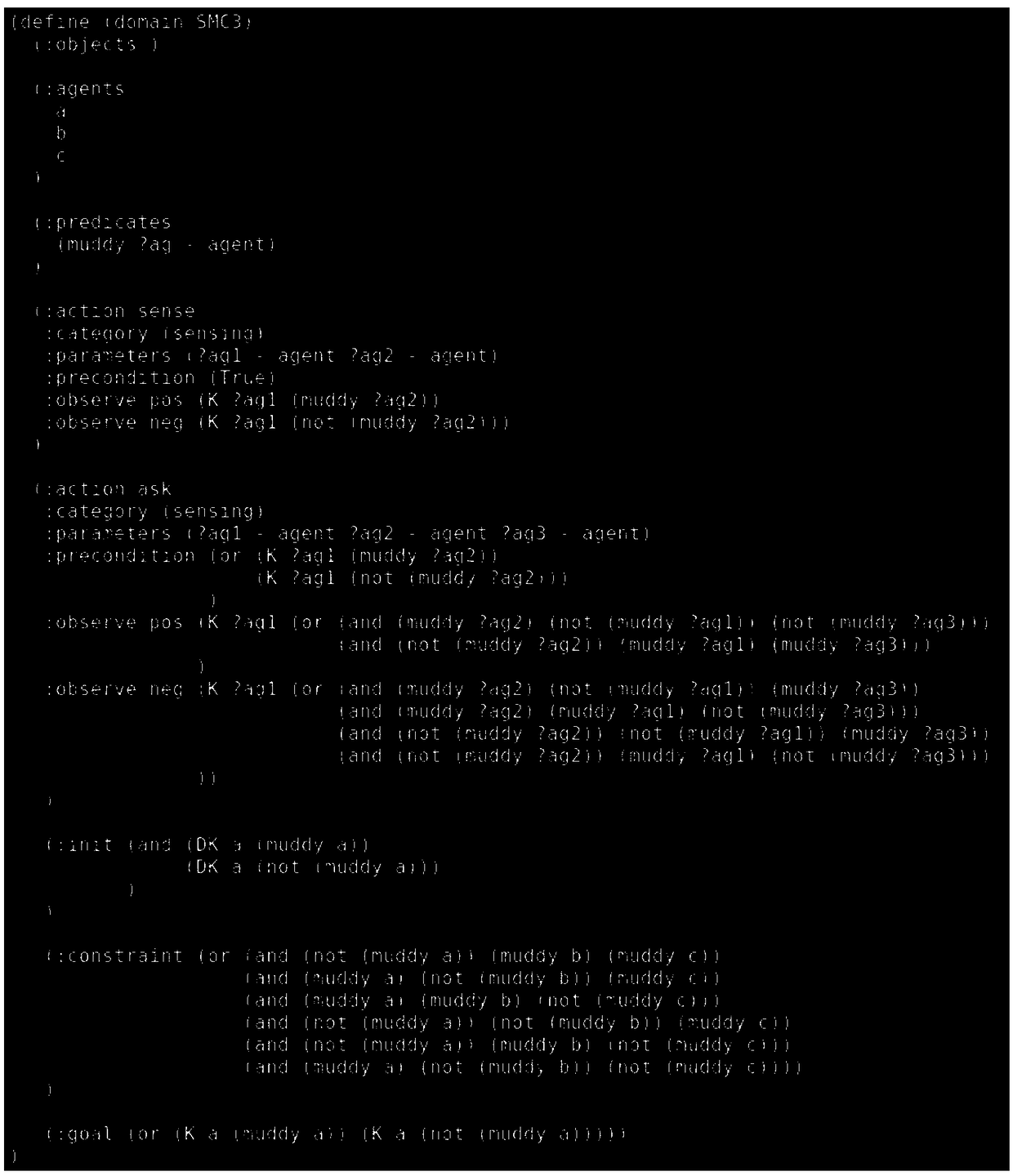
[0068] Input: initial state I, goal G, constraint γ, perceptual action set S, deterministic action set D, where figure 2 for the input document.
[0069] Output: The solution corresponding to th...
Embodiment 2
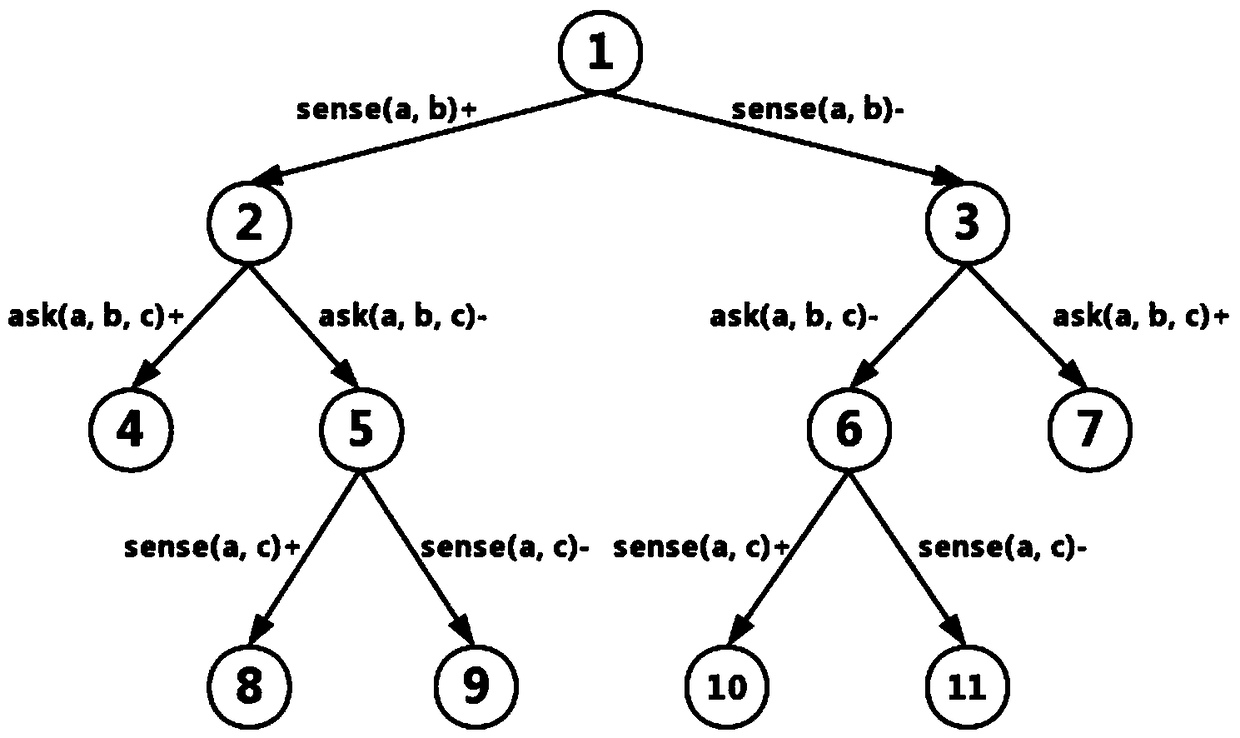
[0095] The input of the multi-agent cognitive planner MEPL based on our algorithm is the problem description document, which is written in EPDDL language, and the output is the solution corresponding to the multi-agent cognitive planning problem, that is, the action tree. Such as image 3 Shown is the input document for Example 1, such as Figure 4 Shown is a solution of Example 1 obtained by MEPL
[0096] The experimental comparison data of the planner MEPL realized based on the algorithm of the present invention and the existing multi-agent cognitive planner MEPK, such as Figure 4 As shown, the first column is the name of the test set, and all the test cases are from the literature of Huang et al., the second column is the number of agents, the third column is the depth of belief formula, the fourth and fifth columns are MEPK and The experimental data of MEPL, where A-B(X / Y) means, A is the total time required (in seconds), B is the time used for the search (in seconds), ...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention provides a multi-agent cognitive planning algorithm based on heuristic search. According to the algorithm, a main planning algorithm of a multi-agent cognitive planning problem is provided. The main planning algorithm is based on definition of a heuristic function of distance between alternate coverage disjunction form (ACDF) formulae and takes a CAO* algorithm based on AO* and ringdetection as a planner. The multi-agent cognitive planning algorithm has good universality. Any higher-order multi-agent cognitive formula can be processed. The deficient problem that in the existingwork, only a sequence solution can be generated, a disjunction formula cannot be processed and the belief nesting depth is limited is solved. Moreover, compared with a naive forward state space searchmethod in the existing work, the algorithm has the advantages that relatively few nodes are expanded in a search process, a solution of the multi-agent cognitive planning problem can be obtained in relatively reasonable time, some relatively large-scale problems also can be processed, and the relatively good expansibility can be achieved.
Description
technical field [0001] The invention relates to the field of computers, in particular to a multi-agent cognitive planning algorithm based on heuristic search. Background technique [0002] Many artificial intelligence tasks today involve multiple agents communicating with each other and cooperating to complete the task, which leads to two requirements. One is the reasoning requirements for multi-agent knowledge or beliefs. Because in many artificial intelligence tasks, at a certain moment Whether an agent can take a specific action depends on whether the preconditions of the action are satisfied, so the agent needs to reason according to its own knowledge or belief; the second is the evolution of multi-agent knowledge or belief. According to the actions taken by the agent, it may affect the objective environment. Influence may also change the knowledge or belief of the agent, so the knowledge or belief of the agent needs to evolve according to the result of the action. In a...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More