

Hybrid robot based on four-branched-chain two-rotation and one-movement parallel mechanism
A four-branch chain and robot technology, applied in the field of robotics, can solve the problem that the structural rigidity is not easy to guarantee, and achieve the effect of reducing the design difficulty, strong adaptability, and improving the overall structural rigidity.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] Exemplary embodiments, features, and performance aspects of the present invention will be described in detail below with reference to the accompanying drawings. The same reference numbers in the figures indicate functionally identical or similar elements. While various aspects of the embodiments are shown in drawings, the drawings are not necessarily drawn to scale unless specifically indicated.
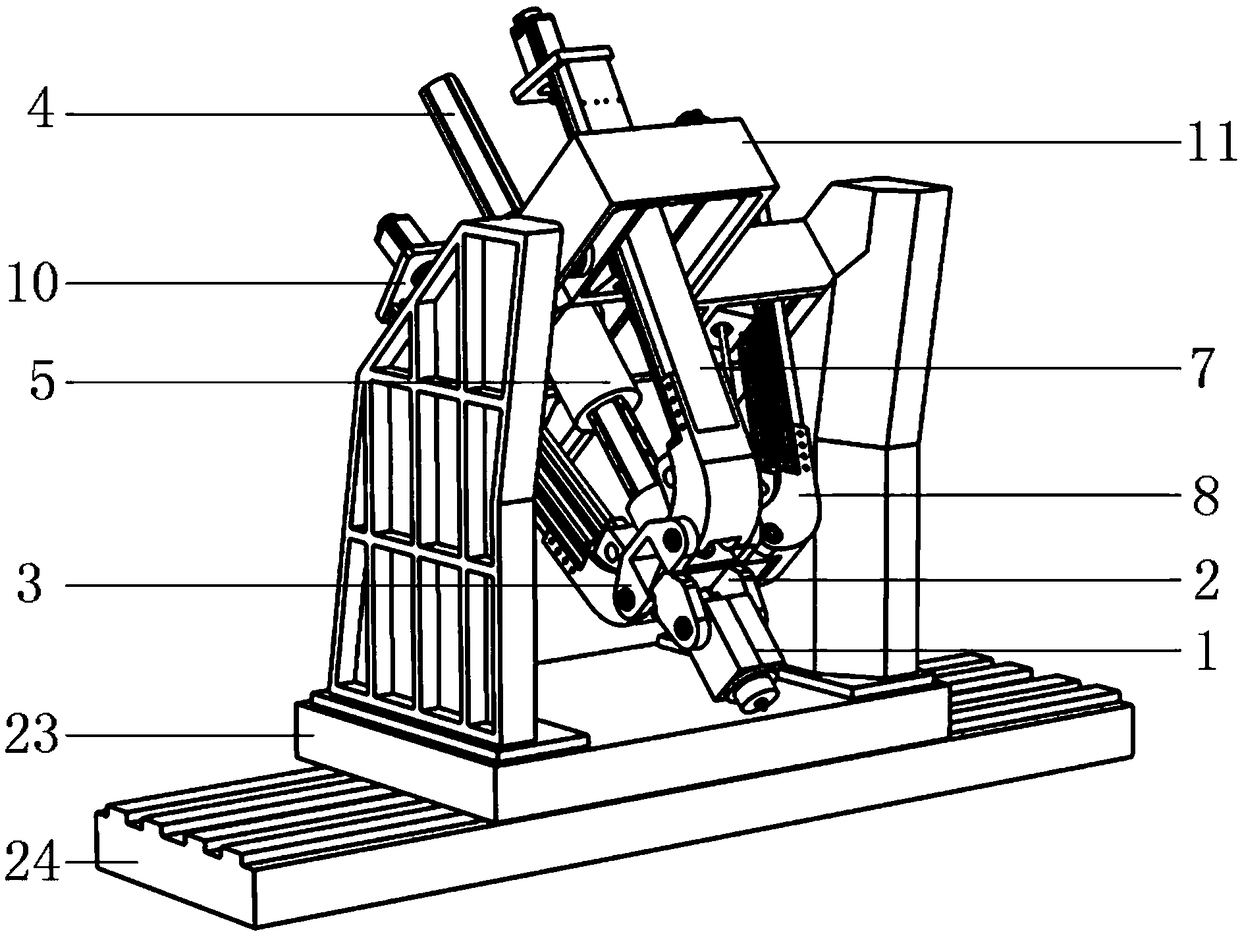
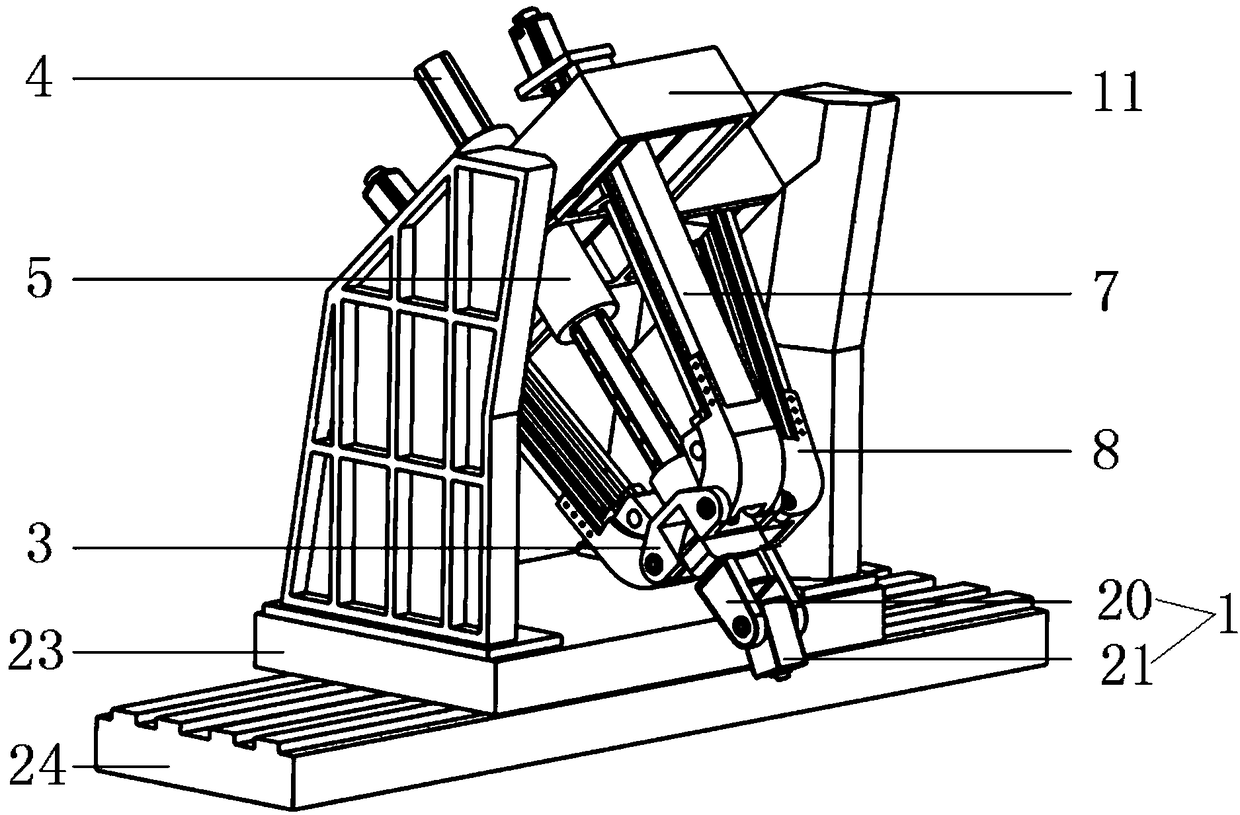
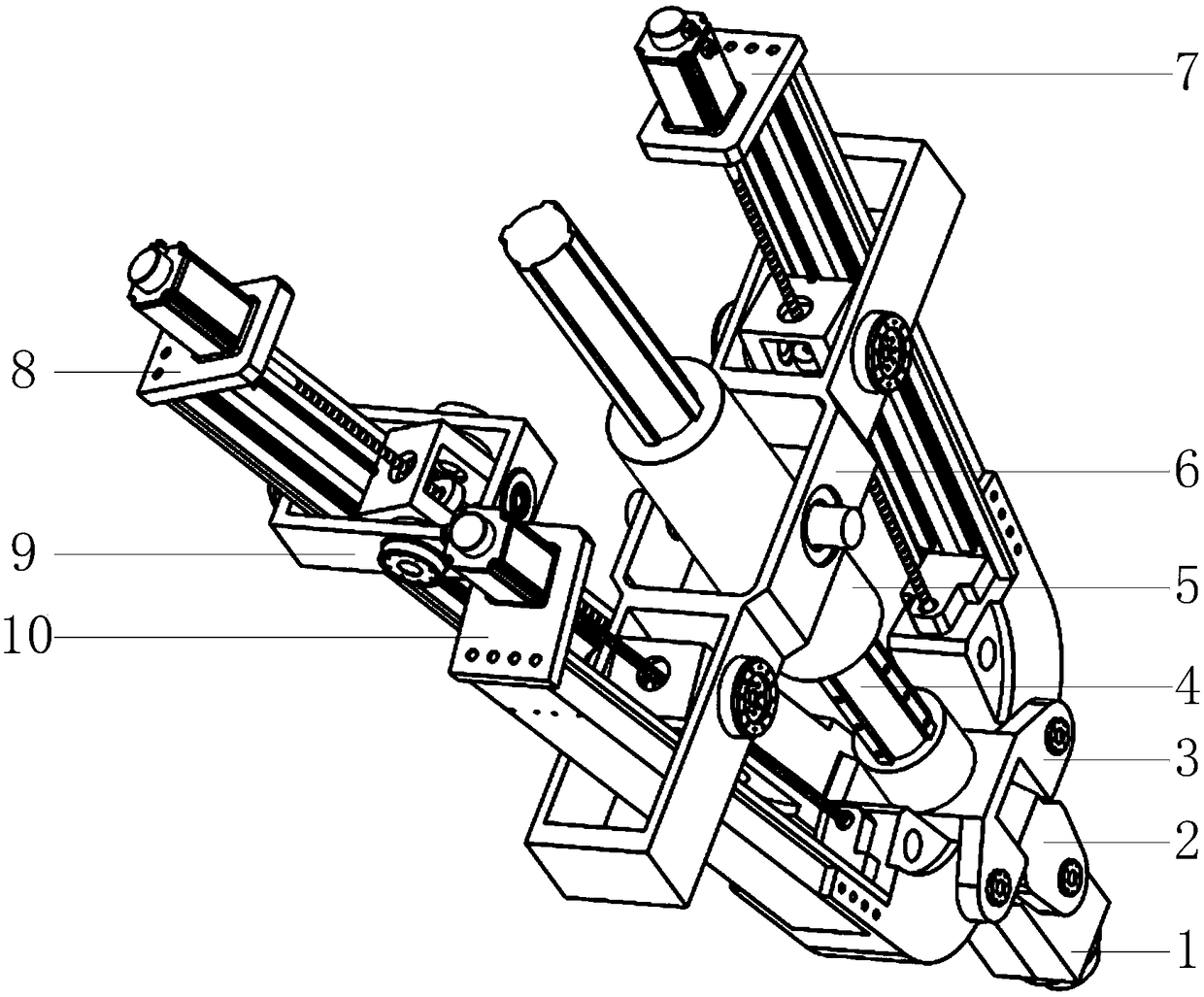
[0032] Such as figure 1 As shown, a hybrid robot based on a four-chain two-rotation-one-movement parallel mechanism includes a parallel mechanism, a swing head mechanism and a mobile platform, such as image 3 As shown, the parallel mechanism includes a driving branch chain, a follow-up branch chain 19, a fixed platform 11, a rotating bracket 9, a fixed support 6, an intermediate platform 3 and a moving platform 2, and the follow-up branch chain 19 and the first drive branch chain constitute a Drive branch chain 7, the second drive branch chain 8 and the 3rd drive branch cha...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More