

Three-dimensional depth data based dynamic gesture recognition method
A dynamic gesture and depth data technology, applied in the field of human-computer interaction, can solve problems such as limited recognition ability and poor dynamic gesture recognition results, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0050] The present invention will be described in detail below with reference to the accompanying drawings and examples.
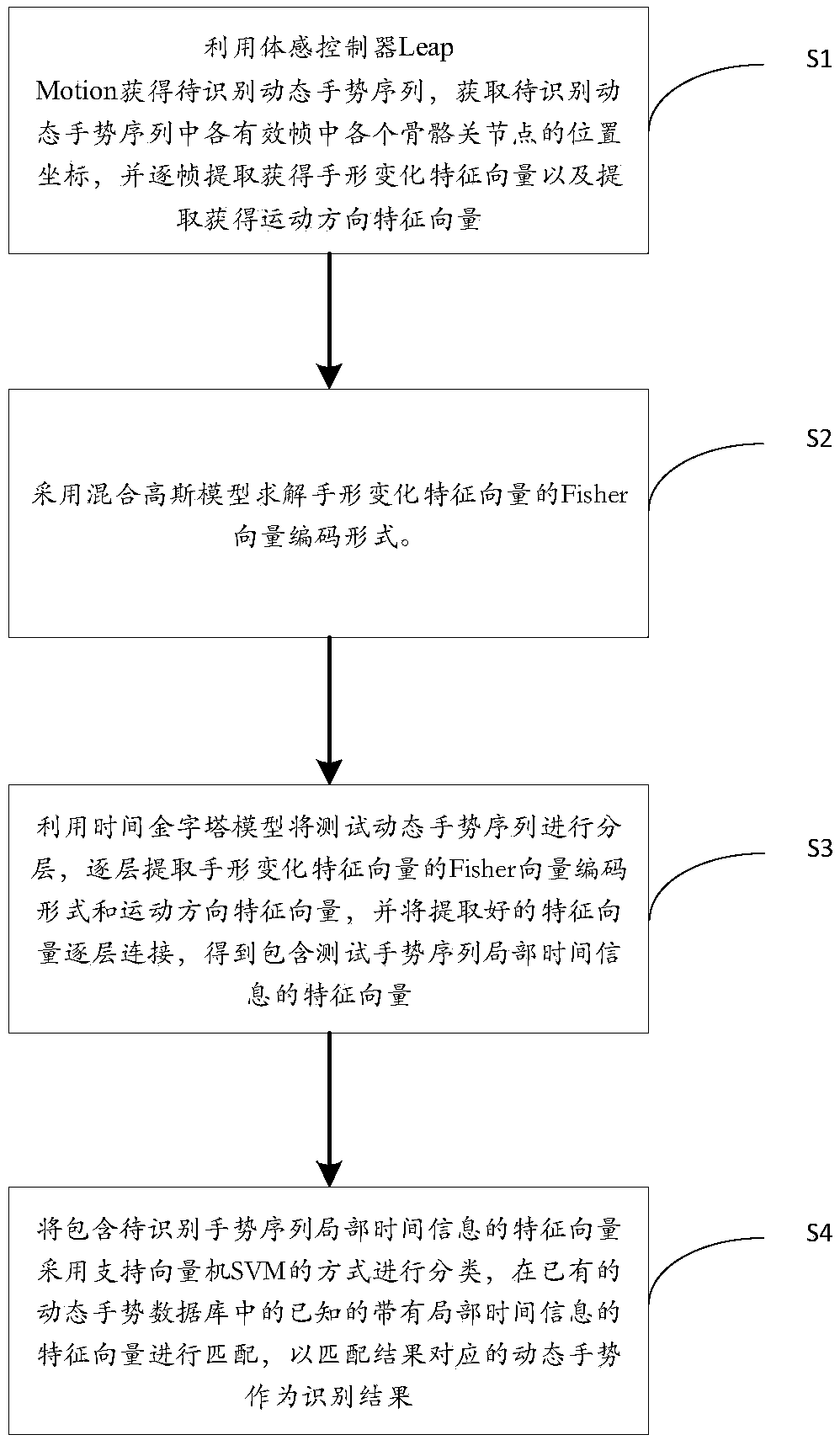
[0051] The present invention provides a dynamic gesture recognition method based on three-dimensional depth data, the process of which is as follows figure 1 shown, including the following steps:
[0052]S1. Use the somatosensory controller Leap Motion to obtain the dynamic gesture sequence to be recognized, obtain the position coordinates of each skeletal joint point in each effective frame in the dynamic gesture sequence to be recognized, and extract the hand shape change feature vector and the motion direction feature vector by frame-by-frame extraction .
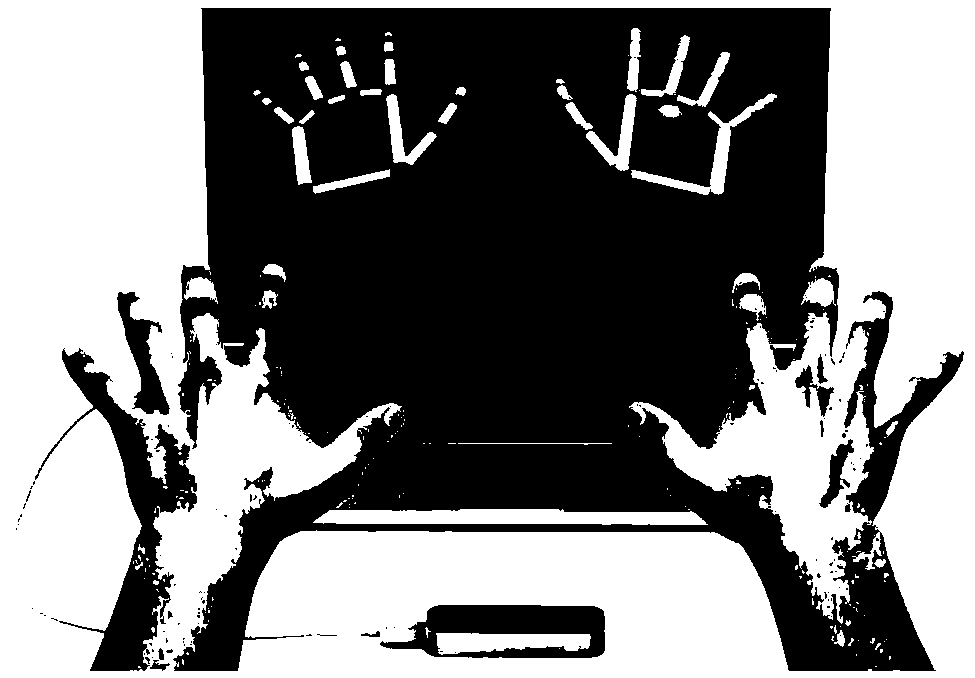
[0053] The hand bone structure provided by Leap Motion is as follows: figure 2 shown. Before officially starting the experimental task, the process and operation method of the task will be explained to the subjects to ensure that the extracted dynamic gesture database is valid.
[0054] Obtain t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More