

vSLAM implementation method and system based on point and line feature fusion
An implementation method and line feature technology, applied in the field of vSLAM implementation system based on point and line feature fusion, can solve the problems of low loop detection accuracy, no closed loop detection, binocular camera calibration, and high computational complexity of pixel depth.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
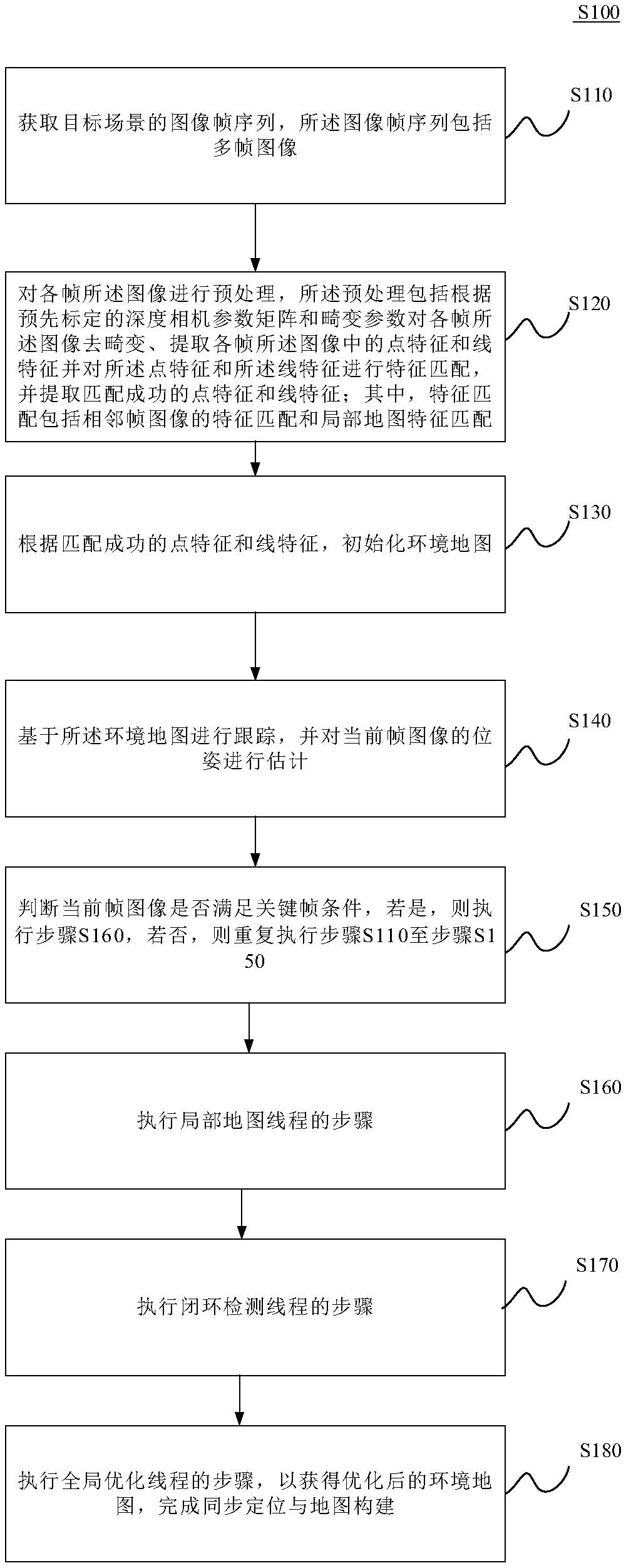
[0091] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. It should be understood that the specific embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
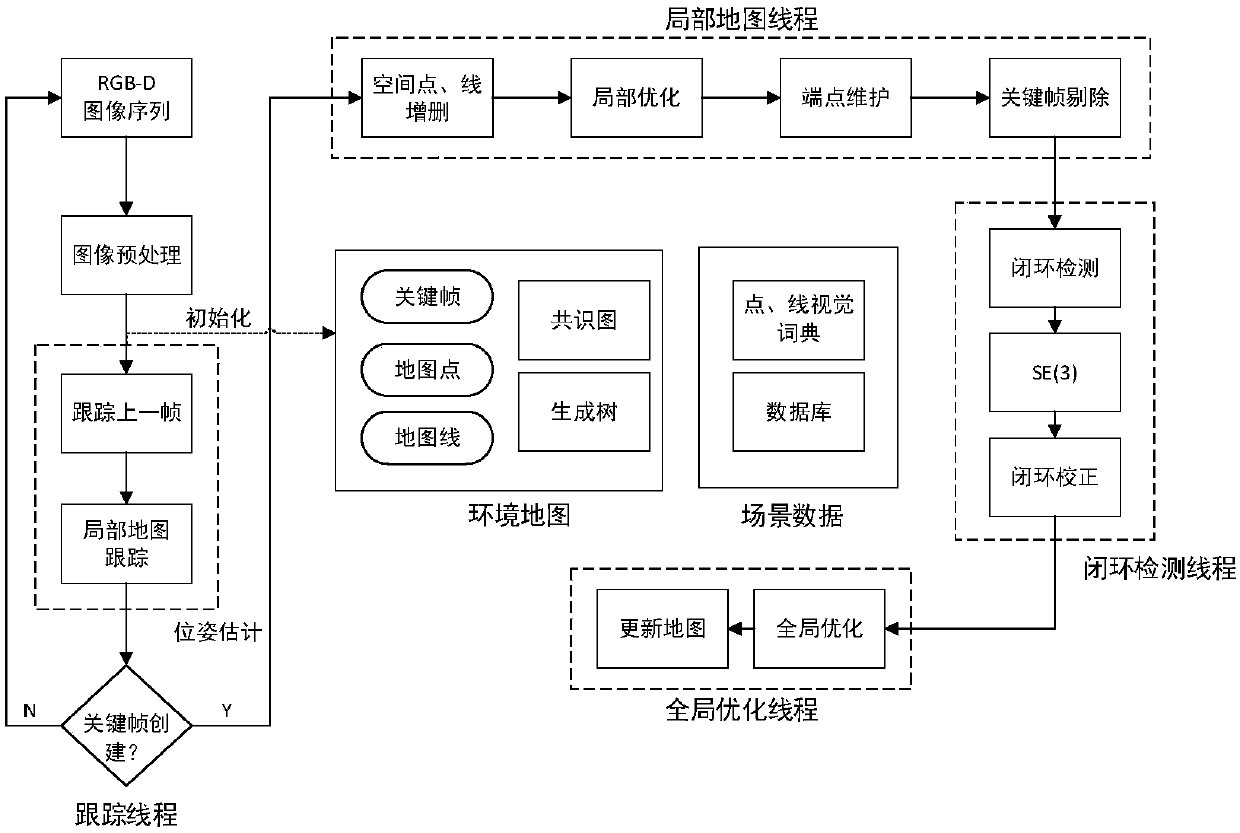
[0092] Such as figure 1 As shown, the vSLAM implementation method based on point and line feature fusion of the present invention mainly includes a tracking thread, a local map thread, a closed-loop detection thread and a global optimization thread.
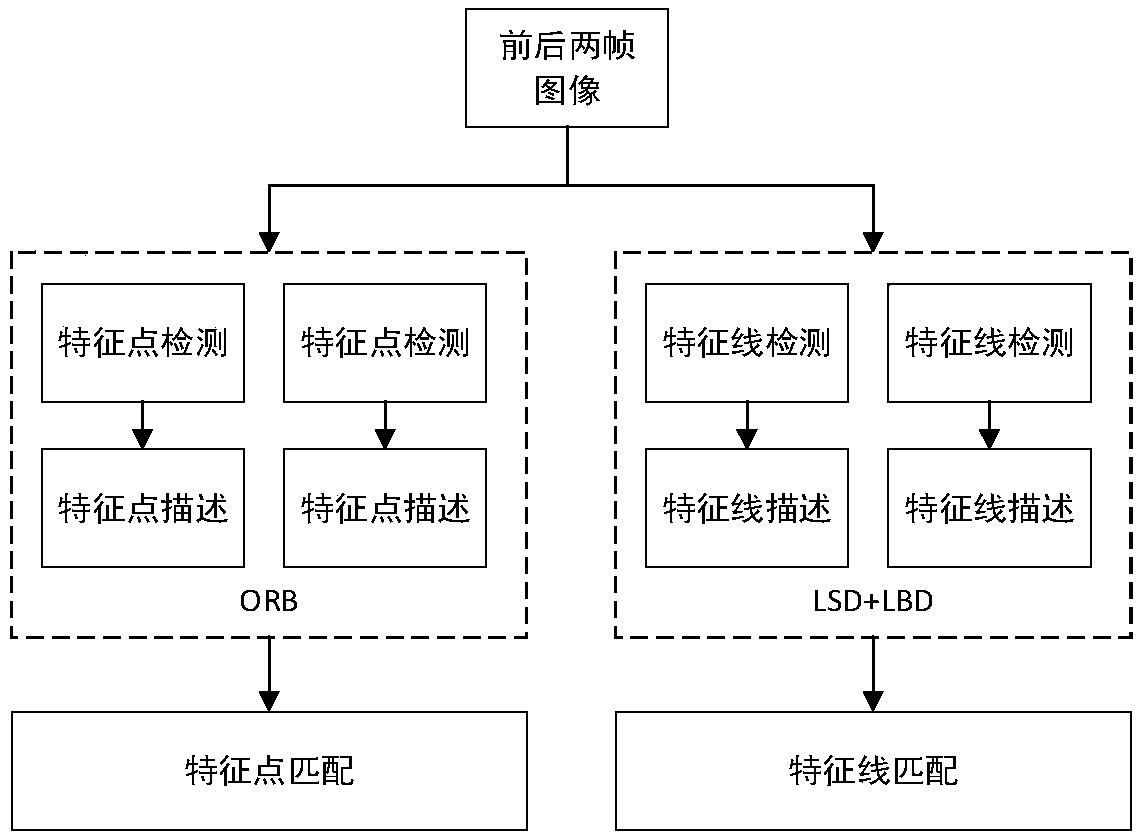
[0093] Tracking thread: The input is the image frame sequence collected by the depth camera, which is divided into color image and depth image, and the image at the same moment is called a frame. The image preprocessing part includes image distortion correction, detection and description of feature points and feature line segments, and feature matching. Tracking is divided into two stages, one is the tracking bet...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More