

Obstacle detection system and method for underwater robot
A technology of underwater robots and detection systems, applied in radio wave measurement systems, instruments, measurement devices, etc., can solve problems such as inability to observe, and achieve the effect of improving obstacle avoidance capabilities
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0020] The present invention will be described in further detail below in conjunction with the accompanying drawings.
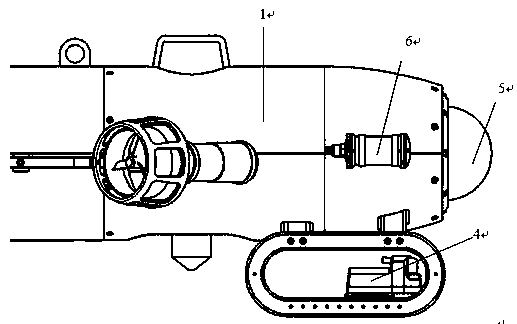
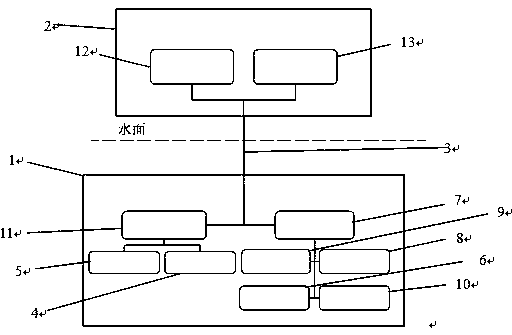
[0021] like figure 1 , figure 2 As shown, an obstacle detection system for an underwater robot is composed of a robot body (1), a ground control box (2) and an umbilical cable (3). The robot body (1) is equipped with a multi-beam image sonar (4), high-definition camera (5), adjustable lighting (6), motion controller (7), pressure sensor (8), temperature sensor (9), attitude indicator compass (10) and UDSL converter (11) .
[0022] The ground control box (2) includes: an image processing unit (12) and a motion control command generator (13); the lower part of the robot body (1) is provided with a multi-beam image sonar (4) for detecting the size of obstacles in front of the robot When installing the multi-beam image sonar (4), ensure that it is installed parallel to the robot body (1), so that the field of view of the multi-beam image sonar (4) is directly...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More