

Man-machine interactive robot system for harvesting field fruits and vegetables and harvesting method of system
A robot system and human-computer interaction technology, applied in the field of fruit and vegetable harvesting robot system and operation process, can solve the problems of high labor intensity, long time consumption, inferior to manual harvesting, etc., to improve operation efficiency, reduce operation cost, improve economic effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] Embodiments of the present invention will be further described below in conjunction with the accompanying drawings.
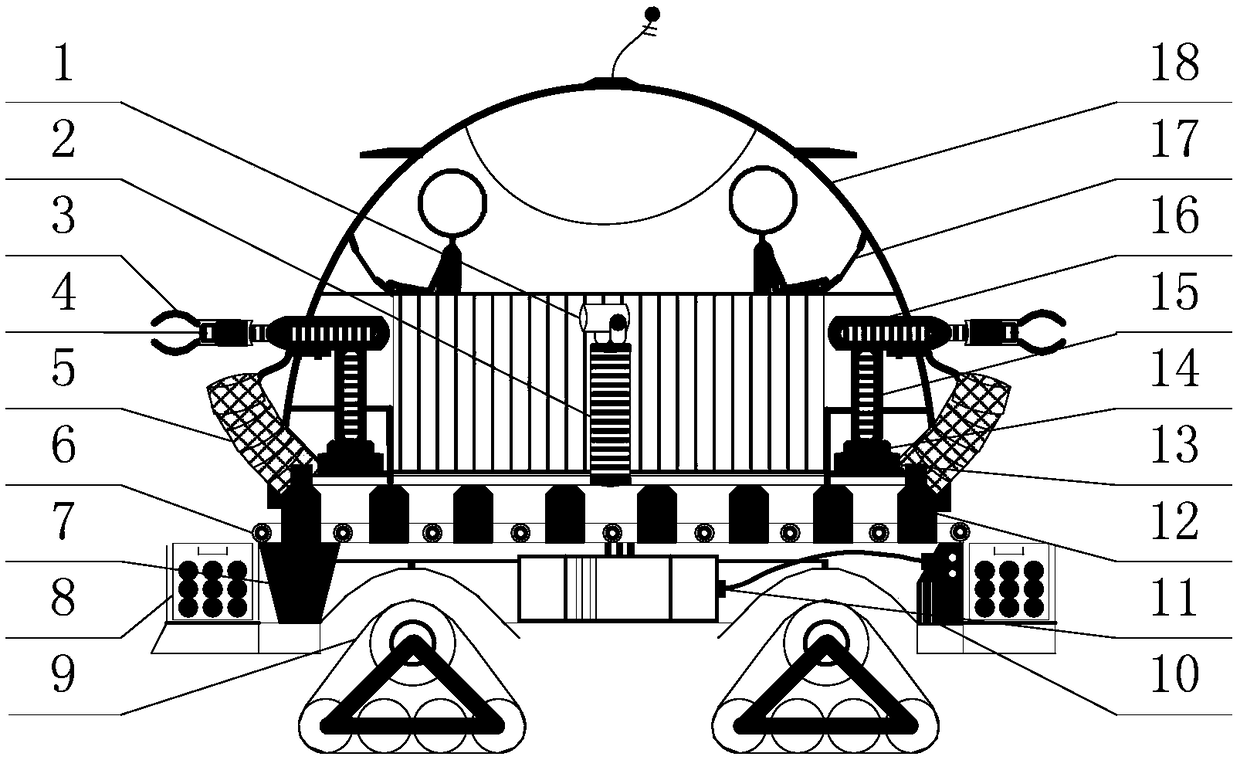
[0031] Such as figure 1 As shown, the human-computer interactive field fruit and vegetable harvesting robot of the present invention includes an image acquisition device, a manipulator device, a robot mobile platform, a fruit and vegetable picking device and a main control device.
[0032] The image acquisition device includes two sets of monocular color cameras 1 and intelligent control pan-tilt 2 equipment; the color camera is placed on the intelligent control pan-tilt, which is equivalent to human eyes, and can move up and down, left and right, and rotate, corresponding to the main control device 11. The interface is connected to realize two-way image acquisition; each set of image acquisition equipment is responsible for the real-time acquisition of images used for harvesting fruits and vegetables by two manipulators.
[0033] The manipulator device...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More